Tiêu chuẩn quốc gia TCVN 11188-1:2015 (ISO 11090-1:2014) về Điều kiện kiểm máy gia công tia lửa điện định hình (EDM định hình) - Kiểm độ chính xác - Phần 1: Máy một trụ (kiểu bàn máy di trượt ngang và bàn máy cố định)
TIÊU CHUẨN QUỐC GIA
TCVN 11188-1:2015
ISO 11090 1:2014
ĐIỀU KIỆN KIỂM MÁY GIA CÔNG TIA LỬA ĐIỆN ĐỊNH HÌNH (EDM ĐỊNH HÌNH) - KIỂM ĐỘ CHÍNH XÁC - PHẦN 1: MÁY MỘT TRỤ (KIỂU BÀN MÁY DI TRƯỢT NGANG VÀ BÀN MÁY CỐ ĐỊNH)
Test conditions for die sinking electro-discharge machines (die sinking EDM) -- Testing of the accuracy -- Part 1: Single-column machines (cross-slide table type and fixed-table type)
Lời nói đầu
TCVN 11188-1:2015 hoàn toàn tương đương với ISO 11090-1:2014.
TCVN 11188-1:2015 do Ban kỹ thuật tiêu chuẩn quốc gia TCVN/TC 39 Máy công cụ biên soạn, Tổng cục Tiêu chuẩn Đo lường Chất lượng đề nghị, Bộ Khoa học và Công nghệ công bố.
Bộ TCVN 11188 (ISO 11090) Điều kiện kiểm máy gia công tia lửa điện định hình - Kiểm độ chính xác bao gồm các phần sau:
- TCVN 11188-1:2015 (ISO 11090-1:2014) Phần 1: Máy một trụ (kiểu bàn máy di trượt ngang và bàn máy cố định);
- TCVN 11188-2:2015 (ISO 11090-2:2014) Phần 2: Máy hai trụ (kiểu ụ di trượt).
ĐIỀU KIỆN KIỂM MÁY GIA CÔNG TIA LỬA ĐIỆN ĐỊNH HÌNH (EDM ĐỊNH HÌNH) - KIỂM ĐỘ CHÍNH XÁC - PHẦN 1: MÁY MỘT TRỤ (KIỂU BÀN MÁY DI TRƯỢT NGANG VÀ BÀN MÁY CỐ ĐỊNH)
Test conditions for die sinking electro-discharge machines (die sinking EDM) -- Testing of the accuracy -- Part 1: Single-column machines (cross-slide table type and fixed-table type)
1. Phạm vi áp dụng
Tiêu chuẩn này qui định các phép kiểm hình học, kiểm gia công và kiểm độ chính xác và khả năng lặp lại định vị của các trục điều khiển số cho các máy gia công tia lửa điện định hình (lòng khuôn) độ chính xác thường và công dụng chung (EDM định hình), có tham chiếu các tiêu chuẩn ISO 230-1 và ISO 230-2. Tiêu chuẩn này cũng qui định các dung sai thích hợp tương ứng cho các phép kiểm đó.
Tiêu chuẩn này được áp dụng cho các máy một trụ kiểu bàn máy di trượt ngang và kiểu bàn máy cố định.
Tiêu chuẩn này chỉ áp dụng để kiểm tra xác nhận độ chính xác của máy, không áp dụng để kiểm vận hành máy (độ rung, độ ồn bất thường, chuyển động giật cục (chuyển động tích thoát) của các bộ phận,...) và cũng không áp dụng để kiểm đặc tính của máy (như tốc độ quay trục chính, lượng chạy dao,...), các phép kiểm này thường được thực hiện trước khi kiểm độ chính xác.
Tiêu chuẩn này đưa ra các thuật ngữ sử dụng cho các bộ phận chính của máy và ký hiệu các trục phù hợp với ISO 841.
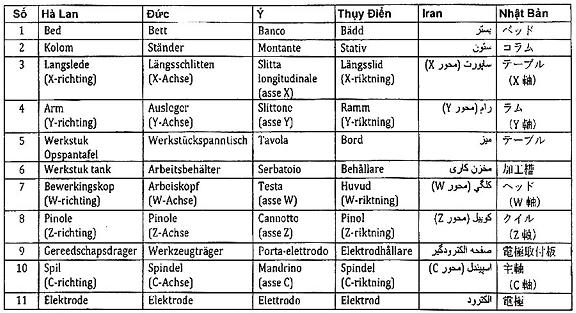
CHÚ THÍCH: Phụ lục A đưa ra các thuật ngữ tương đương bằng tiếng Hà Lan, Đức, Ý, Thụy Điển, Iran và Nhật Bản.
2. Tài liệu viện dẫn
Các tài liệu viện dẫn sau là cần thiết cho việc áp dụng tiêu chuẩn này. Đối với các tài liệu viện dẫn ghi năm công bố thì áp dụng phiên bản được nêu. Đối với các tài liệu viện dẫn không ghi năm công bố thì áp dụng phiên bản mới nhất, bao gồm cả các sửa đổi (nếu có).
ISO 230-1:20121) Test code for machine tools - Part 1: Geometric accuracy of machines operating under no-load or quasi-static conditions (Qui tắc kiểm máy công cụ - Phần 1: Độ chính xác hình học của máy khi vận hành trong điều kiện không tải hoặc gia công gần như tĩnh);
ISO 230-2:20142) Test code for machine tools - Part 2: Determination of accuracy and repeatability of positioning of numerically controlled axes (Qui tắc kiểm máy công cụ - Phần 2: Xác định độ chính xác và khả năng lặp lại định vị của trục điều khiển số).
3. Thuật ngữ và khái niệm
Tiêu chuẩn này áp dụng các thuật ngữ và định nghĩa sau.
3.1. Máy gia công tia lửa điện (electro-discharge machines)
Máy công cụ dùng để loại bỏ vật liệu trong chất lỏng điện môi bằng phóng tia lửa điện riêng biệt theo thời gian và được phân bố một cách ngẫu nhiên trong không gian giữa hai điện cực dẫn điện (điện cực dụng cụ và điện cực chi tiết gia công) và năng lượng phóng tia lửa điện có thể kiểm soát được.
3.2. Máy gia công tia lửa điện định hình (die sinking electro-discharge machines)
Máy công cụ dùng để loại bỏ vật liệu bằng gia công bằng tia lửa điện nhờ ứng dụng một điện cực dụng cụ có dạng hình học khớp với (xác định theo) hình dạng mong muốn của chi tiết gia công.
3.3. Máy cắt dây (wire electro-discharge machines)
Máy công cụ dùng để loại bỏ vật liệu bằng gia công bằng tia lửa điện nhờ ứng dụng một điện cực dạng dây để tạo ra các hình dạng lăng trụ và các hình dạng phức tạp hơn trong một chi tiết gia công.
4. Thuật ngữ và ký hiệu các trục
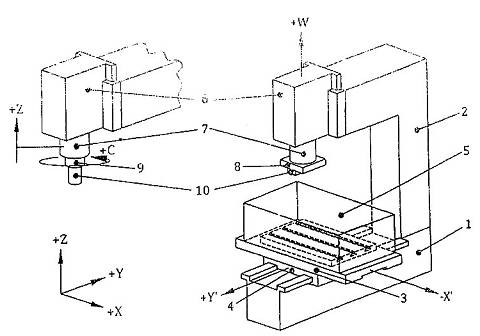
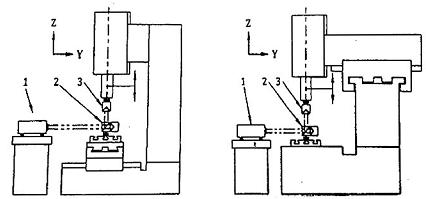
4.1. Kiểu bàn máy di trượt ngang
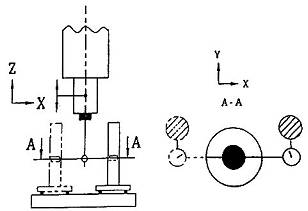
Xem Hình 1 và Bảng 1.
CHÚ THÍCH: Xem các số tham chiếu trong Bảng 1.
Hình 1 - Máy một trụ với bàn máy di trượt ngang
Bảng 1 - Số tham chiếu cho Hình 1
|
Số tham chiếu |
Tiếng Việt |
Tiếng Anh |
Tiếng Pháp |
|
1 |
Băng máy |
Bed |
banc |
|
2 |
Trụ máy |
Column |
montant |
|
3 |
Bàn máy (trục X) |
Table (X-axis) |
table (axe X) |
|
4 |
Bàn trượt (trục Y) |
Saddle (Y-axis) |
Chariot transversal (axe Y) |
|
5 |
Bể gia công |
Work tank |
Réservoir de travail |
|
6 |
Ụ trục chính (trục W) |
Head (W-axis) |
Tête de travail (axe W) |
|
7 |
Ống mang và dẫn hướng trục chính (trục Z) |
Quill (Z-axis) |
Coulisse (axe Z) |
|
8 |
Tấm nối điện cực |
Electrode platen |
Porte-électrode |
|
9 |
Trục chính (trục C) |
Spindle (C-axis) |
Broche (axe C) |
|
10 |
Điện cực |
Electrode |
Electrode |
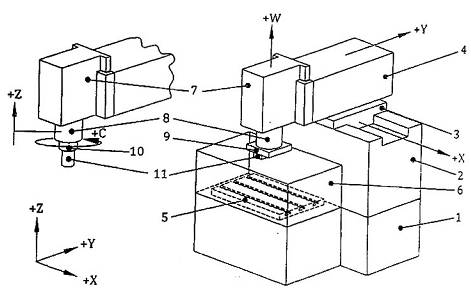
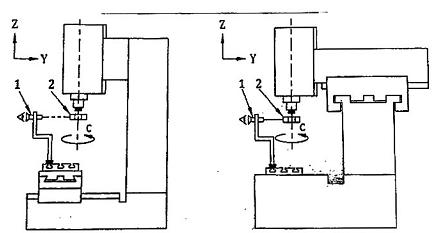
4.2. Kiểu bàn máy cố định
Xem Hình 2 và Bảng 2.
CHÚ THÍCH: Xem các số tham chiếu trong Bảng 2.
Hình 2 - Máy một trụ với bàn máy cố định
Bảng 2 - Số tham chiếu cho Hình 2
|
Số tham chiếu |
Tiếng Việt |
Tiếng Anh |
Tiếng Pháp |
|
1 |
Băng máy |
Bed |
banc |
|
2 |
Trụ máy |
Column |
montant |
|
3 |
Bàn trượt (trục X) |
Saddle (X-axis) |
Chariot transversal (axe X) |
|
4 |
Bàn trượt (trục Y) |
Ram (Y-axis) |
Coulant (axe Y) |
|
5 |
Bàn máy |
Table |
Table |
|
6 |
Bể gia công |
Work tank |
Réservoir de travail |
|
7 |
Ụ trục chính (trục W) |
Head (W-axis) |
Tête de travail (axe W) |
|
8 |
Ống mang và dẫn hướng trục chính (trục Z) |
Quill (Z-axis) |
Coulisse (axe Z) |
|
9 |
Tấm nối điện cực |
Electrode platen |
Porte-électrode |
|
10 |
Trục chính (trục C) |
Spindle (C-axis) |
Broche (axe C) |
|
11 |
Điện cực |
Electrode |
Electrode |
5. Lưu ý ban đầu
5.1. Đơn vị đo
Trong tiêu chuẩn này, tất cả các kích thước, các sai lệch thẳng và các dung sai tương ứng được tính bằng milimét; các kích thước góc được tính bằng độ, các sai lệch góc và các dung sai tương ứng chủ yếu được biểu thị bằng các tỉ số, nhưng trong một số trường hợp, để cho rõ ràng dễ hiểu có thể sử dụng đơn vị micrôradian hoặc giây (cung). Cần lưu ý sự tương đương của các biểu thức sau:
0,010/1000 = 10 x 10-6 = 10 μrad»2”
5.2. Tham chiếu ISO 230-1
Để áp dụng tiêu chuẩn này, cần tham chiếu ISO 230-1 đặc biệt đối với việc lắp đặt máy trước khi kiểm, làm nóng trục chính và các bộ phận chuyển động khác, mô tả các phương pháp đo và độ chính xác khuyến nghị của thiết bị kiểm.
Trong ô “Quan sát và tham chiếu” của các phép kiểm được mô tả trong các Điều 6, 7 và 8 dưới đây, các hướng dẫn được kèm theo bằng việc tham chiếu nội dung tương ứng của ISO 230-1 trong các trường hợp phép kiểm được đề cập tuân theo các điều kiện kỹ thuật. Dung sai áp dụng cho mỗi phép kiểm hình học (xem G1 đến G12).
5.3. Cân bằng máy
Trước khi tiến hành các phép kiểm, nên cân bằng máy theo khuyến nghị của nhà sản xuất/nhà cung cấp (xem 6.1.2, ISO 230-1:2012).
5.4. Trình tự kiểm
Trình tự các phép kiểm được thể hiện trong tiêu chuẩn này không qui định cho kiểm thực tế. Để thực hiện việc lắp đặt các dụng cụ hoặc đồng hồ đo dễ dàng, có thể thực hiện các phép kiểm theo thứ tự bất kỳ.
5.5. Thực hiện các phép kiểm
Khi kiểm máy, không phải lúc nào cũng cần thiết hoặc có thể thực hiện tất cả các phép kiểm được mô tả trong tiêu chuẩn này. Khi kiểm nghiệm thu, người sử dụng lựa chọn các phép kiểm có liên quan đến các bộ phận và/hoặc các đặc tính của máy mà họ quan tâm theo thỏa thuận với nhà chế tạo/nhà cung cấp. Các phép kiểm này phải được qui định rõ ràng trong hợp đồng mua máy. Viện dẫn tiêu chuẩn này cho kiểm nghiệm thu mà không qui định các phép kiểm được tiến hành hoặc không có sự thỏa thuận về chi phí liên quan, không thể được xem là ràng buộc đối với bất kỳ bên nào tham gia hợp đồng.
5.6. Dụng cụ đo
Dụng cụ đo được chỉ dẫn trong các phép kiểm được mô tả trong các Điều 6 đến Điều 8 dưới đây chỉ là các ví dụ. Có thể sử dụng các dụng cụ đo khác có cùng đại lượng đo và có cùng độ không đảm bảo đo hoặc nhỏ hơn.
5.7. Bù bằng sử dụng phần mềm
Khi các tiện ích phần mềm được tích hợp sẵn để dùng cho việc bù hình học, định vị, tạo công tua và/hoặc biến dạng do nhiệt, việc sử dụng chúng trong các phép kiểm này phải trên cơ sở thỏa thuận giữa người sử dụng và nhà sản xuất/nhà cung cấp với sự xem xét theo hướng sử dụng máy công cụ.
Khi sử dụng bù bằng phần mềm thì việc này phải được ghi trong báo cáo kiểm.
Phải lưu ý rằng khi sử dụng bù bằng phần mềm, không được khóa các trục đối với các mục đích kiểm.
5.8. Dung sai nhỏ nhất cho các phép kiểm hình học
Khi thiết lập dung sai cho phép kiểm hình học đối với một chiều dài đo khác so với giá trị cho trong tiêu chuẩn này, giá trị dung sai có thể được xác định theo định luật tỉ lệ (xem 4.1.2 của ISO 230-1:2012). Phải lưu ý rằng giá trị nhỏ nhất của dung sai là 0,005 mm.
5.9. Kiểm gia công
Kiểm gia công phải được thực hiện trong điều kiện gia công tinh.
5.10. Kiểm định vị và tham chiếu ISO 230-2
Các phép kiểm P1 đến P4 chỉ áp dụng cho các máy gia công tia lửa điện được điều khiển số.
Để áp dụng các phép kiểm này, phải tham chiếu ISO 230-2, đặc biệt là đối với các điều kiện của môi trường, làm nóng máy, các phương pháp đo, đánh giá và trình bày các kết quả đo.
Không bao gồm phép kiểm trục W vì chuyển động của trục W được sử dụng để điều chỉnh vị trí ụ. Nếu có yêu cầu thì phải được tiến hành tương tự như kiểm trục Z.
6. Kiểm hình học
6.1. Trục chuyển động tịnh tiến
|
Đối tượng |
G1 |
|
|
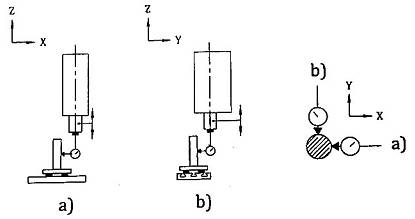
Kiểm độ thẳng chuyển động của trục X: a) Trong mặt phẳng nằm ngang XY (EYX); b) Trong mặt phẳng thẳng đứng ZX (EZX). |
||
|
Sơ đồ
|
||
|
Dung sai Áp dụng cho a) và b) 0,010 đối với chiều dài đo 500 |
Sai lệch đo được a) b) |
|
|
Dụng cụ đo Vật mẫu chuẩn độ thẳng và cảm biến dịch chuyển thẳng hoặc các các dụng cụ đo quang học |
||
|
Quan sát và tham chiếu ISO 230-1:2012 3.4.8, 8.2.2.1 và 8.2.3 a) Lắp cảm biến dịch chuyển thẳng lên ống mang và dẫn hướng trục chính (ụ). b) Chỉnh đặt vật mẫu chuẩn độ thẳng song song với trục X trong mặt phẳng XY và chỉnh đặt cảm biến tiếp xúc với nó. Thực hiện chuyển động chạy dao trục X đi qua chiều dài đo và ghi lại các giá trị đọc. c) Lặp lại phép kiểm theo cách tương tự trong mặt phẳng ZX. |
||
|
Đối tượng |
G2 |
|
|
Kiểm độ thẳng chuyển động của trục Y: a) Trong mặt phẳng nằm ngang XY (EXY); b) Trong mặt phẳng thẳng đứng YZ (EZX). |
||
|
Sơ đồ
|
||
|
Dung sai Áp dụng cho a) và b) 0,010 đối với chiều dài đo 500 |
Sai lệch đo được a) b) |
|
|
Dụng cụ đo Vật mẫu chuẩn độ thẳng, cảm biến dịch chuyển thẳng và các căn mẫu hoặc các các dụng cụ đo quang học |
||
|
Quan sát và tham chiếu ISO 230-1:2012 3.4.8, 8.2.2.1 và 8.2.3 a) Lắp cảm biến dịch chuyển thẳng lên ống mang và dẫn hướng trục chính (ụ). b) Chỉnh đặt vật mẫu chuẩn độ thẳng song song với trục Y trong mặt phẳng XY và chỉnh đặt cảm biến dịch chuyển tiếp xúc với nó. Thực hiện chuyển động chạy dao trục Y đi qua chiều dài đo và ghi lại các giá trị đọc. c) Lặp lại phép kiểm theo cách tương tự trong mặt phẳng YZ. |
||
|
Đối tượng |
G3 |
|
|
Kiểm độ thẳng của chuyển động ống mang và dẫn hướng trục chính (trục Z): a) Trong mặt phẳng ZX (EXZ); b) Trong mặt phẳng YZ (EYZ). |
||
|
Sơ đồ
|
||
|
Dung sai Áp dụng cho a) và b) 0,010 đối với chiều dài đo 300 |
Sai lệch đo được a) b) |
|
|
Dụng cụ đo Vật mẫu chuẩn độ thẳng, tấm kiểm (bàn máp), các căn mẫu điều chỉnh được và cảm biến dịch chuyển thẳng |
||
|
Quan sát và tham chiếu ISO 230-1:2012 3.4.8, 8.2.2.1 và 8.2.3 a) Lắp tấm kiểm lên trên bàn máy. b) Lắp cảm biến dịch chuyển thẳng lên ống mang và dẫn hướng trục chính. c) Chỉnh đặt vật mẫu chuẩn độ thẳng song song với trục Z trong mặt phẳng ZX và chỉnh đặt cảm biến tiếp xúc với vật mẫu chuẩn độ thẳng theo phương trục X. Di chuyển ống mang và dẫn hướng trục chính lên xuống theo phương trục Z đi qua chiều dài đo và ghi lại các giá trị đọc. d) Lặp lại phép kiểm theo cách tương tự trong mặt phẳng YZ. |
||
|
Đối tượng |
G4 |
|
|
Kiểm độ vuông góc của chuyển động trục X so với trục Y (EC(0X)Y) |
||
|
Sơ đồ
|
||
|
Dung sai 0,033/1000 (0,010/300) |
Sai lệch đo được |
|
|
Dụng cụ đo Vật mẫu chuẩn độ thẳng, vật mẫu chuẩn độ vuông góc và cảm biến dịch chuyển thẳng hoặc dụng cụ đo quang học |
||
|
Quan sát và tham chiếu ISO 230-1:2012 3.6.7,10.3.2.2 và 10.3.2.5 a) Chỉnh thẳng vật mẫu chuẩn độ thẳng trên bàn máy song song với chuyển động trục X và ấn vật mẫu chuẩn độ vuông góc tựa vào vật mẫu chuẩn độ thẳng. b) Lắp cảm biến dịch chuyển thẳng lên ống mang và dẫn hướng trục chính (ụ) và chỉnh đặt nó tiếp xúc với vật mẫu chuẩn độ vuông góc. Dẫn tiến trục Y đi qua chiều dài đo và ghi lại các giá trị đọc tại một số vị trí. Độ nghiêng của đường thẳng chuẩn của các giá trị đọc chính là sai số độ vuông góc và phải được báo cáo (xem ISO 230-1:2012, 3.6.7). c) Chỉ sử dụng vật mẫu chuẩn độ vuông góc trong trường hợp sau: 1) Chỉnh đặt vật mẫu chuẩn độ vuông góc sao cho cạnh dài song song với chuyển động trục X, và 2) Kiểm độ song song của chuyển động trục Y với cạnh ngắn. |
||
|
Đối tượng |
G5 |
|
|
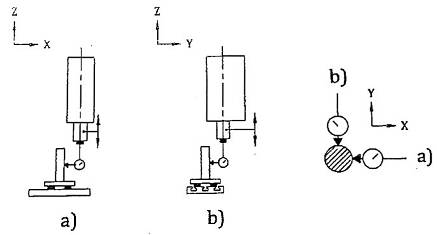
Kiểm độ vuông góc giữa chuyển động thẳng đứng của ống mang và dẫn hướng trục chính (trục Z) với: a) Chuyển động trục X (EB(0X)Z); b) Chuyển động trục Y (EA(0Y)Z). |
||
|
Sơ đồ
|
||
|
Dung sai Áp dụng cho a) và b) 0,05/1000 (0,015/300) |
Sai lệch đo được a) b) |
|
|
Dụng cụ đo Vật mẫu chuẩn độ vuông góc, tấm kiểm, căn mẫu điều chỉnh được và cảm biến dịch chuyển thẳng hoặc các dụng cụ đo quang học |
||
|
Quan sát và tham chiếu ISO 230-1:2012 3.6.7,10.3.2.2 và 10.3.2.5 a) Lắp tấm kiểm lên trên bàn máy và điều chỉnh nó sao cho bề mặt song song với cả hai trục X và Y. Đặt vật mẫu chuẩn độ vuông góc lên tấm kiểm. Lắp cảm biến dịch chuyển thẳng trên ống mang và dẫn hướng trục chính. b) Chỉnh đặt cảm biến dịch chuyển thẳng tiếp xúc với vật mẫu chuẩn độ vuông góc theo phương trục X và di chuyển ống mang và dẫn hướng trục chính theo phương trục Z qua hết chiều dài đo và ghi lại các giá trị đọc tại một số vị trí. Độ nghiêng của đường thẳng chuẩn của các giá trị đọc chính là sai số độ vuông góc và phải được báo cáo (xem ISO 230-1:2012, 3.6.7). c) Lặp lại phép kiểm theo cách tương tự theo phương trục Y. |
||
|
Đối tượng |
G6 |
|
|
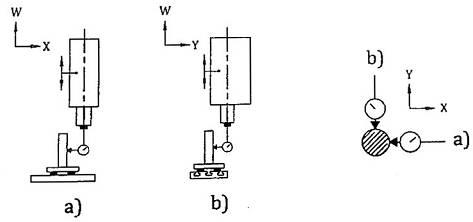
Kiểm độ vuông góc giữa chuyển động thẳng đứng của ụ trục chính (trục W) với: a) Chuyển động trục X (EB(0X)W); b) Chuyển động trục Y (EA(0Y)W). |
||
|
Sơ đồ
|
||
|
Dung sai Áp dụng cho a) và b) 0,05/1000 (0,015/300) |
Sai lệch đo được a) b) |
|
|
Dụng cụ đo Vật mẫu chuẩn độ vuông góc, tấm kiểm, căn mẫu điều chỉnh được, cảm biến dịch chuyển thẳng hoặc các dụng cụ đo quang học |
||
|
Quan sát và tham chiếu ISO 230-1:2012 3.6.7, 10.3.2.2, và 10.3.2.5 a) Lắp tấm kiểm lên trên bàn máy và điều chỉnh nó sao cho bề mặt song song với cả hai trục X và Y. Đặt vật mẫu chuẩn độ vuông góc lên tấm kiểm. Lắp cảm biến dịch chuyển thẳng lên ụ trục chính. b) Chỉnh đặt cảm biến dịch chuyển thẳng tiếp xúc với vật mẫu chuẩn độ vuông góc theo phương trục X. Di chuyển ụ trục chính theo phương trục W qua hết chiều dài đo và ghi lại các giá trị đọc tại một số vị trí. Độ nghiêng của đường thẳng chuẩn của các giá trị đọc chính là sai số độ vuông góc và phải được báo cáo (xem ISO 230-1:2012, 3.6.7). c) Lặp lại phép kiểm theo cách tương tự theo phương trục Y. |
||
|
Đối tượng |
G7 |
|
|
Kiểm sai lệch góc của chuyển động trục Z (ống mang và dẫn hướng trục chính) [chuyển động trục W (ụ trục chính)] trong mặt phẳng XY (lắc xoay, ECZ, hoặc ECW). |
||
|
Sơ đồ
|
||
|
Dung sai 0,06/1000 (0,012/200) |
Sai lệch đo được |
|
|
Dụng cụ đo Vật mẫu chuẩn độ thẳng, tấm kiểm, căn mẫu điều chỉnh được và cảm biến dịch chuyển thẳng |
||
|
Quan sát và tham chiếu (ISO 230-1:2012) 3.4.16, 8.4.2.1, 8.4.2.2, và 8.4.3 a) Lắp tấm kiểm lên trên bàn máy. Đặt vật mẫu chuẩn độ thẳng trên tấm kiểm song song với trục Z, Chỉnh đặt đầu dò của cảm biến dịch chuyển thẳng để cảm biến theo phương trục Y được lắp trên một cần chuyên dùng tiếp xúc với vật mẫu chuẩn độ thẳng. Ghi lại các giá trị đọc và đánh dấu các độ cao tương ứng trên vật mẫu chuẩn độ thẳng. b) Di chuyển bàn máy dọc theo phương trục X và di chuyển cảm biến sang phía bên kia của ống mang và dẫn hướng trục chính (ụ) sao cho đầu dò có thể tiếp xúc lại với vật mẫu chuẩn độ thẳng trên cùng một đường thẳng. Cảm biến dịch chuyển thẳng phải được chỉnh lại về 0 và các phép đo mới phải được thực hiện tại cùng các độ cao giống các phép đo trước và ghi lại các giá trị đọc. c) Đối với mỗi độ cao đo, tính chênh lệch của hai giá trị đọc. Chọn giá trị lớn nhất và nhỏ nhất của các chênh lệch này và giá trị cho bởi công thức: (chênh lệch lớn nhất - chênh lệch nhỏ nhất)/d trong đó “d” là khoảng cách giữa hai vị trí của cảm biến dịch chuyển thẳng, là giá trị sai lệch góc và phải được ghi lại. d) Sai lệch lắc xoay có thể có của chuyển động trục X phải được đo và đưa vào tính toán. |
||
6.2. Bàn máy
|
Đối tượng |
G8 |
|
|
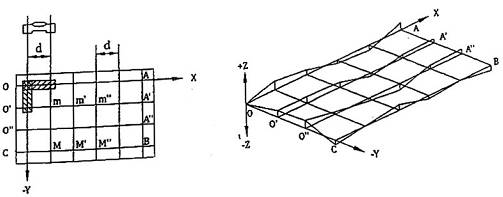
Kiểm độ phẳng của bề mặt bàn máy |
||
|
Sơ đồ
|
||
|
Dung sai 0,03 đối với chiều dài đo đến 1000 Cộng thêm 0,01 cho bất kỳ lượng chiều dài tăng thêm 1000 CHÚ THÍCH: Chiều dài đo nghĩa là chiều dài lớn hơn giữa O-X và O-Y |
Sai lệch đo được |
|
|
Dụng cụ đo Nivô chính xác hoặc vật mẫu chuẩn độ thẳng và cảm biến dịch chuyển thẳng hoặc dụng cụ đo quang học hoặc dụng cụ đo khác |
||
|
Quan sát và tham chiếu ISO 230-1:2012 12.2.4.2 và 12.2.5 a) Chỉnh đặt bàn máy ở tâm theo phương chuyển động trục X và Y. Đặt nivô chính xác trên bề mặt bàn máy và di chuyển nivô theo phương trục X và trục Y từng bước tương ứng với chiều dài của nó và ghi lại các giá trị đọc. Phương pháp đo sai lệch góc dọc theo từng phương này dựa trên tiêu chuẩn ISO 230-1:2012, 12.1.3. b) Phép đo phải được bắt đầu từ điểm O, O’... và C và được thực hiện trên đường OA, O’A’, ...và đường CB theo phương X, sau đó bắt đầu từ điểm O và được thực hiện trên đường OC theo phương Y. c) Sai số độ phẳng phải được tính toán theo ISO 230-1:2012, 12.2.4.2 và được ghi trong báo cáo. |
||
|
Đối tượng |
G9 |
|
|
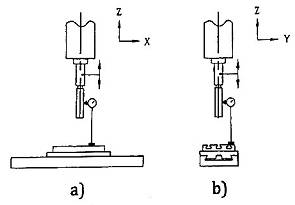
Kiểm độ song song giữa bề mặt bàn máy và: a) Chuyển động trục X (EB(OX)bàn máy); b) Chuyển động trục Y (EA(OY)bàn máy). |
||
|
Sơ đồ
|
||
|
Dung sai Áp dụng cho a) và b) 0,015 cho chiều dài đo 300 Dung sai lớn nhất: 0,04 |
Sai lệch đo được |
|
|
Dụng cụ đo Cảm biến dịch chuyển thẳng và vật mẫu chuẩn độ thẳng |
||
|
Quan sát và tham chiếu ISO 230-1:2012 3.6.5 và 12.3.2.5 a) Lắp cảm biến lên ống mang và dẫn hướng trục chính (ụ). b) Đầu dò của cảm biến phải tiếp xúc với bề mặt bàn máy. Dẫn tiến trục X đi qua chiều dài đo và ghi lại các giá trị đọc. c) Lặp lại phép kiểm theo cách tương tự theo phương trục Y. d) Phép đo phải được thực hiện xấp xỉ dọc các đường tâm của bàn máy theo các phương X và Y nếu có thể được. e) Nếu phép đo trực tiếp bàn máy là khó khăn, ví dụ do các rãnh chữ T, thì có thể sử dụng một vật mẫu chuẩn độ thẳng đặt trên bàn máy (xem 12.3.2.5.2, ISO 230-1:2012). |
||
6.3. Ụ trục chính, ống mang và dẫn hướng trục chính và trục chính
|
Đối tượng |
G10 |
|
|
Kiểm độ song song giữa tấm nối điện cực (tấm) và: a) Chuyển động trục X (EB(OX)Tấm); b) Chuyển động trục Y (EA(OY)Tấm). |
||
|
Sơ đồ
|
||
|
Dung sai Áp dụng cho a) và b) 0,01 cho chiều dài đo 200 |
Sai lệch đo được a) b) |
|
|
Dụng cụ đo Cảm biến dịch chuyển thẳng |
||
|
Quan sát và tham chiếu ISO 230-1:2012 3.6.5 và 12.3.2.5.2 a) Đặt cảm biến lên bàn máy. b) Chỉnh đặt đầu dò cảm biến tiếp xúc với bề mặt tấm nối điện cực. c) Dẫn tiến trục X đi qua chiều dài đo và ghi lại các giá trị đọc tại một số vị trí. Chênh lệch lớn nhất của các giá trị đọc là sai số độ song song và phải được báo cáo. d) Lặp lại phép kiểm theo cách tương tự theo phương trục Y. |
||
|
Đối tượng |
G11 |
|
|
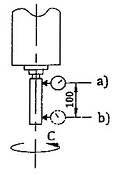
Kiểm độ đảo của lỗ trục chính: a) Gần đầu mút trục chính; b) Tại điểm cách 100 mm. |
||
|
Sơ đồ
|
||
|
Dung sai a) 0,005 b) 0,01 |
Sai lệch đo được a) b) |
|
|
Dụng cụ đo Trục kiểm và cảm biến dịch chuyển thẳng |
||
|
Quan sát và tham chiếu ISO 230-1:2012 3.9.7 và 12.5.3 a) Lắp trục kiểm vào trục chính. b) Lắp cảm biến lên bàn máy. c) Chỉnh đặt cảm biến tiếp xúc với trục kiểm tại vị trí gần với đầu mút trục chính, quay trục chính và ghi lại các giá trị đọc. d) Lặp lại phép kiểm theo cách tương tự tại vị trí cách vị trí trước 100 mm. |
||
|
Đối tượng |
G12 |
|
|
Kiểm độ song song giữa đường tâm trục chính và chuyển động Z: a) Trong mặt phẳng ZX (EB(OZ)C) b) Trong mặt phẳng YZ (EA(OZ)C) |
||
|
Sơ đồ
|
||
|
Dung sai Áp dụng cho a) và b) 0,1/1000 (0,01/100) |
Sai lệch đo được a) b) |
|
|
Dụng cụ đo Trục kiểm và cảm biến dịch chuyển thẳng |
||
|
Quan sát và tham chiếu ISO 230-1:2012 3.6.4, và 10.1.4.3 a) Lắp cảm biến lên bàn máy. b) Chỉnh đặt cảm biến tiếp xúc với trục kiểm trong mặt phẳng ZX và tìm vị trí trung bình của trục chính bằng cách quay trục chính. Di chuyển ống mang và dẫn hướng trục chính theo phương Z và ghi lại các giá trị đọc tại một số vị trí. Độ nghiêng của đường thẳng chuẩn của các giá trị đọc chính là sai số độ song song và phải được báo cáo. c) Lặp lại phép kiểm theo cách tương tự trong mặt phẳng YZ. |
||
7. Kiểm định vị cho các trục điều khiển số
Để áp dụng các phép kiểm này phải tham chiếu ISO 230-2, đặc biệt là đối với điều kiện môi trường, làm nóng máy, mô tả phương pháp đo, đánh giá và trình bày kết quả đo.
Không bao gồm phép kiểm trục W vì chuyển động của trục W được sử dụng để điều chỉnh vị trí ụ. Nếu có yêu cầu thì phép kiểm trục W phải được tiến hành tương tự như kiểm trục Z.
|
Đối tượng |
P1 |
||||
|
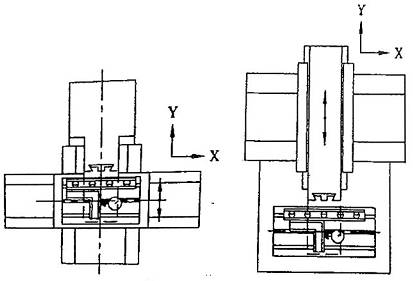
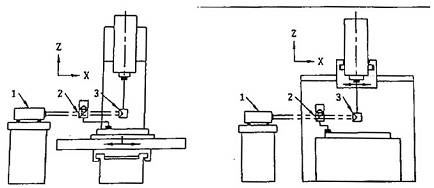
Kiểm độ chính xác, khả năng lặp lại và giá trị đảo chiều định vị của chuyển động trục X (EXX). |
|||||
|
Sơ đồ
CHÚ DẪN: 1 Đầu laze 2 Giao thoa kế 3 Gương phản xạ |
|||||
|
Dung sai |
Chiều dài đo |
Sai lệch đo được |
|||
|
≤ 500 |
≤ 1000 |
≤ 2000 |
|
||
|
Độ chính xác định vị theo hai chiều EXX,A |
0,012 |
0,016 |
0,020 |
|
|
|
Khả năng lặp lại định vị theo một chiều EXX, R và EXX, R¯ |
0,005 |
0,008 |
0,010 |
|
|
|
Khả năng lặp lại theo hai chiều EXX, R |
0,010 |
0,012 |
0,016 |
|
|
|
Giá trị đảo chiều của trục EXX,B |
0,008 |
0,010 |
0,013 |
|
|
|
Giá trị đảo chiều trung bình EXX, |
0,004 |
0,005 |
0,006 |
|
|
|
Sai lệch định vị hệ thống theo hai chiều EXX,E |
0,010 |
0,012 |
0,016 |
|
|
|
Sai lệch định vị hai chiều trung bình của trục EXX,M |
0,006 |
0,008 |
0,010 |
|
|
|
Dụng cụ đo Thiết bị đo laze hoặc thang đo tuyến tính |
|||||
|
Quan sát và tham chiếu ISO 230-1:2012, 8.3 và ISO 230-2:2014 Thang đo tuyến tính hoặc trục của chùm tia của thiết bị đo laze phải được chỉnh đặt song song với trục sẽ kiểm. Về nguyên tắc, chạy dao nhanh được sử dụng cho định vị, nhưng có thể sử dụng lượng chạy dao tùy chọn theo sự thỏa thuận giữa người sử dụng và nhà sản xuất/nhà cung cấp. |
|||||
|
Đối tượng |
P2 |
||||
|
Kiểm độ chính xác, khả năng lặp lại và giá trị đảo chiều định vị của chuyển động trục Y (EYY). |
|||||
|
Sơ đồ
CHÚ DẪN: 1 Đầu laze 2 Giao thoa kế 3 Gương phản xạ |
|||||
|
Dung sai |
Chiều dài đo |
Sai lệch đo được |
|||
|
≤ 500 |
≤ 1000 |
≤ 2000 |
|
||
|
Độ chính xác định vị theo hai chiều EYY,A |
0,012 |
0,016 |
0,020 |
|
|
|
Khả năng lặp lại định vị theo một chiều EYY, R và EYY, R¯ |
0,005 |
0,008 |
0,010 |
|
|
|
Khả năng lặp lại theo hai chiều EYY, R |
0,010 |
0,012 |
0,016 |
|
|
|
Giá trị đảo chiều của trục EYY,B |
0,008 |
0,010 |
0,013 |
|
|
|
Giá trị đảo chiều trung bình EYY, |
0,004 |
0,005 |
0,006 |
|
|
|
Sai lệch định vị hệ thống theo hai chiều EYY,E |
0,010 |
0,012 |
0,016 |
|
|
|
Sai lệch định vị hai chiều trung bình của trục EYY,M |
0,006 |
0,008 |
0,010 |
|
|
|
Dụng cụ đo Thiết bị đo laze hoặc thang đo tuyến tính |
|||||
|
Quan sát và tham chiếu ISO 230-1:2012, 8.3 và ISO 230-2:2014 Thang đo tuyến tính hoặc trục của chùm tia của thiết bị đo laze phải được chỉnh đặt song song với trục sẽ kiểm. Về nguyên tắc, chạy dao nhanh được sử dụng cho định vị, nhưng có thể sử dụng lượng chạy dao tùy chọn theo sự thỏa thuận giữa người sử dụng và nhà sản xuất/nhà cung cấp. |
|||||
|
Đối tượng |
P3 |
|||
|
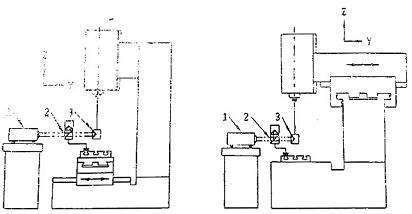
Kiểm độ chính xác, khả năng lặp lại và giá trị đảo chiều định vị của chuyển động trục Z (EZZ). |
||||
|
Sơ đồ
CHÚ DẪN: 1 Đầu laze 2 Giao thoa kế 3 Gương phản xạ |
||||
|
Dung sai |
Chiều dài đo |
Sai lệch đo được |
||
|
≤ 250 |
≤ 500 |
≤ 1000 |
|
|
|
Độ chính xác định vị theo hai chiều EZZ,A |
0,010 |
0,012 |
0,016 |
|
|
Khả năng lặp lại định vị theo một chiều EZZ, R và EZZ, R¯ |
0,004 |
0,005 |
0,008 |
|
|
Khả năng lặp lại theo hai chiều EZZ, R |
0,008 |
0,010 |
0,012 |
|
|
Giá trị đảo chiều của trục EZZ,B |
0,006 |
0,008 |
0,010 |
|
|
Giá trị đảo chiều trung bình EZZ, |
0,003 |
0,004 |
0,005 |
|
|
Sai lệch định vị hệ thống theo hai chiều EZZ,E |
0,008 |
0,010 |
0,012 |
|
|
Sai lệch định vị hai chiều trung bình của trục EZZ,M |
0,005 |
0,006 |
0,008 |
|
|
Dụng cụ đo Thiết bị đo laze hoặc thang đo tuyến tính |
||||
|
Quan sát và tham chiếu ISO 230-1:2012, 8.3 và ISO 230-2:2014 Thang đo tuyến tính hoặc trục của chùm tia của thiết bị đo laze phải được chỉnh đặt song song với trục sẽ kiểm. Về nguyên tắc, chạy dao nhanh được sử dụng cho định vị, nhưng có thể sử dụng lượng chạy dao tùy chọn theo sự thỏa thuận giữa người sử dụng và nhà sản xuất/nhà cung cấp. |
||||
|
Đối tượng |
P4 |
||
|
Kiểm độ chính xác, khả năng lặp lại và giá trị đảo chiều định vị của chuyển động trục C (ECC). |
|||
|
Sơ đồ
CHÚ DẪN: 1 Ống tự chuẩn trực 2 Gương đa giác |
|||
|
Dung sai (tính bằng giây cung) |
Sai lệch đo được |
||
|
Độ chính xác định vị theo hai chiều ECC,A |
80 |
|
|
|
Khả năng lặp lại định vị theo một chiều ECC, R và ECC, R¯ |
40 |
|
|
|
Khả năng lặp lại theo hai chiều ECC, R |
55 |
|
|
|
Giá trị đảo chiều của trục ECC,B |
40 |
|
|
|
Giá trị đảo chiều trung bình ECC, |
20 |
|
|
|
Sai lệch định vị hệ thống theo hai chiều ECC,E |
65 |
|
|
|
Sai lệch định vị hai chiều trung bình của trục ECC,M |
40 |
|
|
|
Dụng cụ đo - Ống tự chuẩn trực và gương đa giác, - Bộ mã hóa quay, hoặc - Giao thoa kế Iaze đo góc có bàn phân độ. |
|||
|
Quan sát và tham chiếu ISO 230-1:2012, 9.2 và ISO 230-2:2014 Đo ít nhất tại bốn vị trí là 0°, 90°, 180° và 270°. Số lượng vị trí đo phụ thuộc vào số mặt gương phản xạ nếu sử dụng ống tự chuẩn trực và gương đa giác cho phép đo. Nếu các khoảng không đổi giữa các vị trí được áp dụng cho kiểm trục quay mà nó là đặc trưng cho gương đa giác thì việc này phải được đề cập trong báo cáo kiểm. |
|||
8. Kiểm gia công
|
Đối tượng |
M1 |
||
|
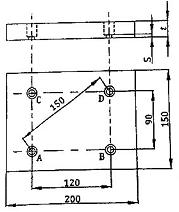
Kiểm độ chính xác về khoảng cách giữa các lỗ và độ chênh đường kính của các lỗ được gia công tinh. a) Độ chính xác về khoảng cách giữa các lỗ; b) Độ chênh đường kính được đo theo các phương X và Y. |
|||
|
Sơ đồ
|
Lỗ gia công Đường kính lỗ: ø10 ~ ø12 Khoảng cách giữa các lỗ: 120 x 90 Chiều sâu lỗ: 5 Lượng dư gia công hướng kính: 0,5 (đường kính lỗ trước gia công nên bằng 9 đối với đường kính đã gia công tinh 10) Phôi Thép: 200 x 150 Chiều dày khuyến nghị của tấm, t = 25 mm, nhưng cũng có thể chấp nhận được tấm dày 5 mm. Khi chiều dày tấm t lớn hơn 5 mm thì cần thiết phải khỏa miệng lỗ ở mặt sau. Điện cực Thanh đồng dạng trụ Điều kiện gia công Điều kiện gia công tinh như độ nhám bề mặt đã gia công tinh Ra bằng hoặc nhỏ hơn 2 μm. Điện cực không được quay tròn. |
||
|
Dung sai a) Độ chính xác khoảng cách lỗ AC, BD 90 ± 0,02 CD, AB 120 ± 0,02 AD, BC 150 ± 0,03 b) Độ chênh đường kính theo các phương X và Y: 0,02 |
Sai lệch đo được a) b) |
||
|
Dụng cụ đo Máy đo tọa độ hoặc máy đo quang học Dụng cụ đo đường kính trong, các chốt và panme |
|||
|
Quan sát và tham chiếu ISO 230-1:2012 , Phụ lục B, ISO 1101 Quá trình gia các công lỗ trước gia công có thể thực hiện trước hoặc sau khi gá đặt phôi trên bàn máy nhưng cần đảm bảo lượng gia công hướng kính đồng đều. |
|||
PHỤ LỤC A
THUẬT NGỮ TƯƠNG ĐƯƠNG BẰNG TIẾNG HÀ LAN, ĐỨC, Ý, THỤY ĐIỂN, IRAN VÀ NHẬT BẢN
Bảng A.1 - Kiểu bàn máy di trượt ngang
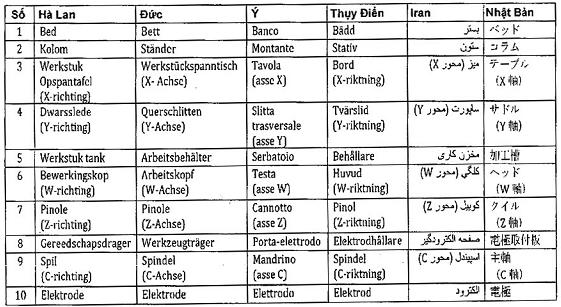
Bảng A.2 - Kiểu bàn máy cố định
THƯ MỤC TÀI LIỆU THAM KHẢO
[1] ISO 841:2001 Industrial automation systems and integration - Numerical control of machines - Coordinate system and motion nomenclature (Các hệ thống tự động công nghiệp và tích hợp - Điều khiển số của máy - Hệ thống tọa độ và danh mục chuyển động)
[2] ISO 1101:2012 Geometrical product specifications (GPS) - Geometrical tolerancing - Tolerances of form, orientation, location and run-out (Đặc tính hình học sản phẩm (GPS) - Dung sai hình học - Dung sai hình dạng, hướng, vị trí và độ đảo)
[3] ISO/TR 230-11 Test code for machine tools - Part 11: Measuring instruments and their application to machine tool geometry tests (Qui tắc kiểm máy công cụ - Phần 11: Dụng cụ đo và ứng dụng của chúng cho các phép kiểm hình học máy công cụ)
1) Hiện đã có TCVN 7011 -1:2007 (ISO 230-1:1996) Qui tắc kiểm máy công cụ - Phần 1: Xác định độ chính xác và khả năng lặp lại định vị của trục điều khiển số.
2) Hiện đã có TCVN 7011-2:2007 (ISO 230-2:1997) Qui tắc kiểm máy công cụ - Phần 2: Độ chính xác Hình học của máy khi vận hành trong điều kiện không tải hoặc gia công tinh.