Tiêu chuẩn quốc gia TCVN 6371:1998 về Rung cơ học của các máy quay lớn có tốc độ từ 10 đến 200 vòng/giây – Đo và đánh giá cường độ rung tại vị trí làm việc
TIÊU CHUẨN QUỐC GIA
TCVN 6371 : 1998
RUNG CƠ HỌC CỦA CÁC MÁY QUAY LỚN CÓ TỐC ĐỘ TỪ 10 ĐẾN 200 VÒNG/GIÂY - ĐO VÀ ĐÁNH GIÁ CƯỜNG ĐỘ RUNG TẠI VỊ TRÍ LÀM VIỆC
Mechanical vibration of large rotating machines with speed range from 10 to 200 rev/s -measurement and evaluation of vibration severity in situ
Lời nói đầu
TCVN 6371 : 1998 được biên soạn dựa trên việc tham khảo tiêu chuẩn ISO 1940-1: 1986(E)
TCVN 6371 : 1998 do Tiểu ban kỹ thuật TCVN/SC1 Các vấn đề chung về cơ khí biên soạn, Tổng cục Tiêu chuẩn Đo lường Chất lượng đề nghị, Bộ Khoa học, Công nghệ và Môi trường (nay là Bộ Khoa học và Công nghệ) ban hành.
Tiêu chuẩn này được chuyển đổi năm 2008 từ Tiêu chuẩn Việt Nam cùng số hiệu thành Tiêu chuẩn Quốc gia theo quy định tại khoản 1 Điều 69 của Luật Tiêu chuẩn và Quy chuẩn kỹ thuật và điểm a khoản 1 Điều 6 Nghị định số 127/2007/NĐ-CP ngày 1/8/2007 của Chính phủ quy định chi tiết thi hành một số điều của Luật Tiêu chuẩn và Quy chuẩn kỹ thuật.
RUNG CƠ HỌC CỦA CÁC MÁY QUAY LỚN CÓ TỐC ĐỘ TỪ 10 ĐẾN 200 VÒNG/GIÂY - ĐO VÀ ĐÁNH GIÁ CƯỜNG ĐỘ RUNG TẠI VỊ TRÍ LÀM VIỆC
Mechanical vibration of large rotating machines with speed range from 10 to 200 rev/s -measurement and evaluation of vibration severity in situ
1. Phạm vi áp dụng
Tiêu chuẩn này qui định các qui tắc đánh giá rung động của các động cơ chính và các máy khác có khối lượng quay, có công suất lớn hơn 300 kw và tốc độ từ 10 đến 200 vg/s (ví dụ : động cơ điện và máy phát, tua bin hơi nước và tua bin khí, máy nén tuabo, bơm tuabo, quạt. Các máy này có thể được nối với khớp nối trục cứng hoặc đàn hồi hoặc được nối với truyền động bánh răng. Đường tâm của các trục quay có thể nằm ngang, thẳng đứng hoặc nghiêng) .
Tiêu chuẩn này không áp dụng cho các động cơ chính và các máy trong đó các bộ phận làm việc chính có chuyển động tịnh tiến qua lại.
Các trị số cường độ rung được qui định trong tiêu chuẩn này có thể áp dụng cho các máy quay tương tự khi được đo và đánh giá phù hợp với các yêu cầu của tiêu chuẩn này
2. Đại lượng đo (cường độ rung)
Thuật ngữ "cường độ rung" trong tiêu chuẩn này là một đại lượng đặc trưng đơn giản và dễ hiểu để mô tả trạng thái rung động của một máy. Cường độ rung được xác định là trị số quân phương của vận tốc rung trong phạm vi từ 10 đến 1000 Hz. Trị số lớn nhất đo được tại các điểm đo và hướng đo đã định đặc trưng cho trạng thái rung động của một máy.
Đối với rung động điều hòa có vận tốc tức thời vi = cos wi t, và đối với rung động phức gồm một số rung động điều hòa chồng lên nhau, có các tần số khác nhau, cường độ độ rung được xác định và được đo như là trị số quân phương của vận tốc rung.
Từ các vận tốc rung đo được theo thời gian, có thể tính trị số quân phương vrms của vận tốc rung như sau:
(1)
Gia tốc vận tốc và / hoặc biên độ dịch chuyển (j = 1,2,3,...n) được xác định là các hàm số của các tần số góc (w1, w2 ... wn) từ sự phân tích của phổ đã ghi được.
Khi biết được biên độ rung hoặc biên độ vận tốc rung hoặc biên độ của gia tốc trị số vrms được xác định:
(2)
Trong trường hợp rung động chỉ gồm có hai thành phần tần số xấp xỉ nhau tạo ra các phách, có thể xác định vrms từ các số liệu ghi được của vận tốc rung đo được theo thời gian.
Trong đó
là trị số đỉnh tại điểm cực đại của đường bao (chỗ lồi);
là trị số đỉnh tại điểm cực tiểu của đường bao (chỗ lõm).
Khi dùng dụng cụ chỉ thị trị số bình quân phương thức của vận tốc rung (xem Chú Thích của 5.1), trị số quân phương của rung động có phách có thể được xác định gần đúng:
(4)
trong đó:
Rmax là số chỉ thị lớn nhất của dụng cụ
Rmin là số chỉ thị nhỏ nhất của dụng cụ
Chú thích - Sự tắt dần của dao động sẽ tạo ra một số chỉ thị trung bình của các phách với một tần số trung bình. Rõ ràng là từ công thức (4) một số chỉ thị trung bình của trị số quân phương là một số chỉ thị sai. Các số chỉ thị lớn nhất và nhỏ nhất là không thể tin cậy được đối với sự đáp ứng (độ nhậy) của dụng cụ, trừ khi ở các tần số phách rất thấp.
3. Khí cụ đo
Rung động của một máy phải được đo và biểu thị hoặc ghi bằng các khí cụ đo kiểu điện và / hoặc cơ khí với dải tần số từ 10 đến 1000HZ.
3.1. Tính năng làm việc
Phải biết rõ các đặc tính sau đây của hệ thống đo:
- các biến đổi về nhiệt độ;
- từ trường;
- trường âm;
- các biến đổi về nguồn năng lượng;
- chiều dài cáp của bộ chuyển đổi;
- sự định hướng của bộ chuyển đổi
Ngoài các yếu tố trên cần biết thêm các giới hạn về tính năng làm việc như độ tuyến tính của biên độ, độ nhạy ngang v.v...
Chú thích - Khí cụ đo kiểu tín hiệu- kiểm tra cần tạo ra một tín hiệu đã được xử lý của trị số quân phương (rms) cho đồng hồ chỉ báo Không dùng các đồng hồ chỉ báo có thang đo để đọc trị số quân phương thông qua tín hiệu hình sin trừ khi rung động được đo là hình sin. Hệ thống đo phải có đặc tính tần số phù hợp với Hình 1.
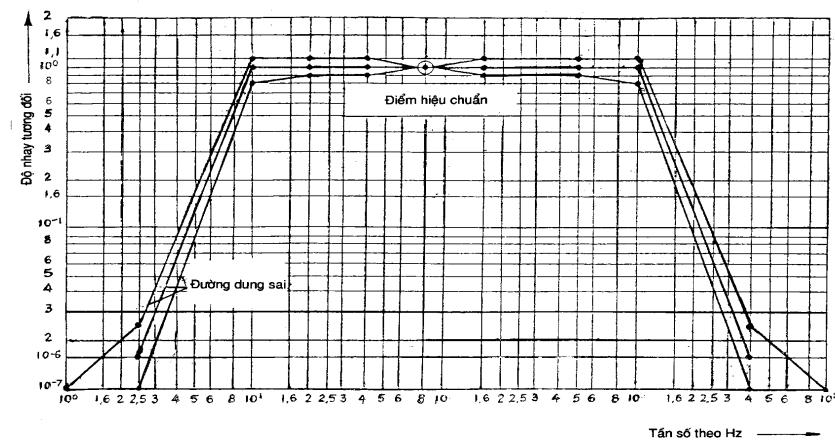
Hình 1 - Đặc tính độ nhạy tần số đối với hệ thống đo rung
3.2. Hiệu chuẩn
Trước khi sử dụng khí cụ đo rung phải xem xét ảnh hưởng của các yếu tố đã nêu trong 3.1 cùng với vị trí của máy tới quá trình đo. Phải hiệu chuẩn thường xuyên hệ thống khí cụ đo để bảo đảm cho các kết quả có thể tin cậy được. Hệ thống khí cụ đo bao gồm bộ chuyển đổi, bộ kiểm tra xử lý tín hiệu và đồng hồ chỉ báo.
Để hiệu chuẩn, đầu đọc phải được kích thích bằng một chuyển động thẳng, điều hòa, đơn giản với sai lệch hướng rung với hướng trục đo của đầu đọc không lớn hơn ± 5o. Hệ số méo của vận tốc rung không được vượt quá 5 %. Phải biết biên độ vận tốc rung kích thích với sai số nhỏ hơn ± 3 % trong toàn bộ phạm vi tần số đo.
3.3. Lắp đặt
Việc lắp đặt bộ chuyển đổi đo rung phải đảm bảo không ảnh hưởng đến đặc tính rung được đo của máy.
4. Các điểm đo
Thực hiện phép đo trên các ổ trục chính theo cả hai phương ngang và dọc so với đường tâm trục như đã nêu trên Hình 2 và Hình 3.
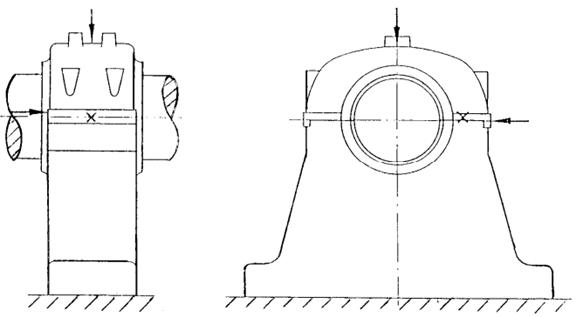
Hình 2
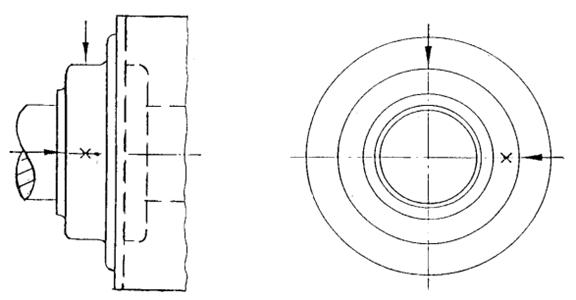
Hình 3
Trong trường hợp các máy được đặt thẳng đứng hoặc nghiêng cần chọn các điểm đo để có các số chỉ thị lớn nhất và các điểm đo đặc biệt phải được ghi lại. Nên bố trí các điểm đo trên máy ở nơi dễ tiếp cận. Phải chú ý sao cho các phép đo phản ánh đúng rung động của thân ổ trục và không chịu ảnh hưởng của cộng hưởng cục bộ.
5. Điều kiện đo
Phải tiến hành các phép đo khi rôto và các ổ trục chính đã đạt tới nhiệt độ làm việc bình thường ổn định và với các máy làm việc ở điều kiện danh định, phải tiến hành các phép đo khi đã đạt được điều kiện này, ví dụ như điện áp danh định, lưu lượng, áp suất, tải trọng danh định. Đối với các máy có tốc độ hoặc tải trọng cố định thì các điều kiện về tốc độ hoặc tải trọng danh định được chỉ dẫn trên nhãn máy.
Đối với các máy có tốc độ hoặc tải trọng thay đổi phải thực hiện các phép đo ở các điều kiện giới hạn (tốc độ đo và tải trọng lớn nhất) thêm vào đó là ở các điều kiện được lựa chọn trong phạm vi của các giới hạn này. Giá trị lớn nhất đo được đặc trưng cho cường độ rung.
6. Hệ thống máy / bệ đỡ
Các điều kiện về bệ đỡ được xác định bởi quan hệ giữa máy và độ mềm dẻo của nền móng trong hướng đo. Đối với một bệ đỡ mềm, tần số riêng cơ bản của hệ thống máy/ bệ đỡ thấp hơn tần số kích thích chính của hệ thống. Đối với một bệ đỡ cứng, tần số riêng cơ bản của hệ thống máy bệ đỡ cao hơn tần số kích thích chính của hệ thống.
6.1. Xác định loại hệ thống máy / bệ đỡ
Nếu không thể xác định được loại của một hệ thống máy/ bệ đỡ từ hình vẽ và tính toán thì có thể phân loại hệ thống này bằng một phép thử rung cưỡng bức hoặc một phép thử rung tự do. Phép thử rung tự do bao gồm sự quan sát đáp tuyến tần số chuyển tiếp của một hệ thống máy bệ đỡ đối với một va chạm. Phép thử rung cưỡng bức bao gồm sự quan sát đường đặc trưng ổn định của hệ thống máy / bệ đỡ đối với lực có tần số thay đổi.
6.2. Phân loại bệ đỡ
Các phạm vi cường độ rung trong tiêu chuẩn này phụ thuộc vào độ mềm dẻo của bệ đỡ. Có hai loại bệ đỡ:
- bệ đỡ cứng;
- bệ đỡ mềm.
Trong một số trường hợp, một hệ thống máy / bệ đỡ có thể là cứng ở một điểm đo trong một hướng đo và là mềm ở một điểm đo và hướng đo khác. Trong những trường hợp này phải xác định cường độ rung phù hợp với sự phân loại và phép đo thích hợp
6.3. Xác định môi trường chủ động
Các hệ thống bệ đỡ đã nêu trên được xếp loại thụ động vì chúng nhận các nhiễu không quan trọng từ bên ngoài vào máy. Một môi trường chủ động được tạo ra khi độ tăng của giá trị cường độ rung, với máy đang làm việc, nhỏ hơn ba lần giá trị cường độ rung khi máy không làm việc.
Tiêu chuẩn này không đưa ra sự phân loại cường độ rung đối với các hệ thống bệ đỡ chủ động.
6.4. Rung động chiều trục
Việc đánh giá rung động chiều trục của ổ trục phụ thuộc vào chức năng và cấu trúc của ổ trục.
Đối với ổ chặn, các rung động chiều trục có tương quan với lực va đập, có thể làm hư hỏng máng lót kim loại của ổ trượt hoặc các chi tiết của ổ lăn chống ma sát. Các rung động chiều trục của các ổ trục này phải được đánh giá theo cùng một cách như đối với các rung động ngang. Khi ổ trục không có các bộ phận chống rung chiều trục, cho phép có yêu cầu thấp hơn.
7. Các giới hạn về cường độ rung
Đánh giá chất lượng về cường độ rung của các máy lớn có phạm vi tốc độ từ 10 đến 200vg/s được cho trong Bảng 1.
Bảng 1 - Đánh giá chất lượng của cường độ rung
Cường độ rung | Phân loại bệ đỡ | ||
vrms | vrms | Bệ đỡ cứng | Bệ đỡ mềm |
0,46 | 0,018 | Tốt | Tốt |
0,71 | 0,028 | ||
1,12 | 0,044 | ||
1,8 | 0,071 | ||
2,8 | 0,11 | Đạt yêu cầu | |
4,6 | 0,18 | Đạt yêu cầu | |
7,1 | 0,28 | Không đạt yêu cầu | |
11,2 | 0,44 | Không đạt yêu cầu | |
18,0 | 0,71 | Không chấp nhận được | |
28,0 | 1,10 | Không chấp nhận được | |
71,0 | 2,80 | ||
Trị số bình phương trung bình
Tỷ số của lượng sóng hài của trị số quân phương rms với trị số quân phương tổng của sóng hình sin bị méo.