Tiêu chuẩn quốc gia TCVN 9945-2:2013 (ISO 7870-2:2013) về Biểu đồ kiểm soát - Phần 2: Biểu đồ kiểm soát Shewhart
TIÊU CHUẨN QUỐC GIA
TCVN 9945-2:2013
ISO 7870-2:2013
BIỂU ĐỒ KIỂM SOÁT - PHẦN 2: BIỂU ĐỒ KIỂM SOÁT SHEWHART
Control charts - Part 2: Shewhart control charts
Lời nói đầu
TCVN 9945-2:2013 thay thế cho TCVN 7076:2002 (ISO 8258:1991);
TCVN 9945-2:2013 hoàn toàn tương đương với ISO 7870-2:2013;
TCVN 9945-2:2013 do Ban kỹ thuật tiêu chuẩn quốc gia TCVN/TC 69 Ứng dụng các phương pháp thống kê biên soạn, Tổng cục Tiêu chuẩn Đo lường Chất lượng đề nghị, Bộ Khoa học và Công nghệ công bố.
Bộ tiêu chuẩn TCVN 9945, chấp nhận bộ tiêu chuẩn ISO 7870, gồm các tiêu chuẩn dưới đây có tên chung “Biểu đồ kiểm soát”:
- TCVN 9945-1:2013 (ISO 7870-1:2007), Phần 1: Hướng dẫn chung
- TCVN 9945-2:2013 (ISO 7870-2:2013), Phần 2: Biểu đồ kiểm soát Shewhart
- TCVN 9945-3:2013 (ISO 7870-3:2012), Phần 3: Biểu đồ kiểm soát chấp nhận
- TCVN 9945-4:2013 (ISO 7870-4:2011), Phần 4: Biểu đồ tổng tích lũy
Lời giới thiệu
Cách tiếp cận sản xuất truyền thống phụ thuộc vào sản xuất để tạo ra sản phẩm và dựa vào kiểm soát chất lượng để kiểm tra sản phẩm cuối cùng và sàng lọc các cá thể không đáp ứng các quy định. Chiến lược phát hiện này thường lãng phí và không kinh tế vì nó liên quan đến việc kiểm tra sau khi sự sản xuất lãng phí đã xảy ra. Thay vào đó, sẽ hiệu quả hơn nhiều nếu xây dựng chiến lược phòng ngừa để tránh lãng phí ngay từ đầu bằng cách không sản xuất ra những sản phẩm không dùng được. Điều này có thể thực hiện được nhờ thu thập thông tin về quá trình và phân tích thông tin để có hành động xử lý kịp thời cho chính quá trình.
Biểu đồ kiểm soát là công cụ đồ thị ứng dụng các nguyên lý thống kê quan trọng để kiểm soát quá trình do Tiến sỹ Walter Shewhart đưa ra lần đầu tiên vào năm 1924. Lý thuyết biểu đồ kiểm soát thừa nhận hai loại biến động. Loại thứ nhất là độ biến động ngẫu nhiên do “nguyên nhân tình cờ” (còn được gọi là nguyên nhân thông thường/tự nhiên/ngẫu nhiên/vốn có/không kiểm soát được”). Loại này do nhiều nguyên nhân thường có mặt và khó nhận biết, mỗi nguyên nhân này tạo thành một phần rất nhỏ của sự biến động toàn phần nhưng không nguyên nhân nào đóng góp một lượng đáng kể. Tuy nhiên đóng góp của tất cả các nguyên nhân ngẫu nhiên không nhận biết được này có thể đo được và được giả định là vốn có đối với quá trình. Việc loại bỏ hoặc điều chỉnh nguyên nhân thông thường đòi hỏi quyết định phân bổ nguồn lực để thay đổi về cơ bản quá trình và hệ thống.
Loại biến động thứ hai biểu thị sự thay đổi thực sự trong quá trình. Sự thay đổi này có thể là do một số nguyên nhân nhận biết được, không phải là phần vốn có của quá trình và, ít nhất về lý thuyết, có thể loại bỏ được. Nguyên nhân nhận biết được này được gọi là “nguyên nhân ấn định được” (còn được gọi là nguyên nhân đặc biệt/không tự nhiên/hệ thống/ kiểm soát được) của độ biến động. Chúng có thể do sự không đồng đều trong nguyên vật liệu, công cụ hỏng, trình độ tay nghề hay quy trình, tính năng bất thường của thiết bị hoặc thay đổi môi trường gây ra.
Quá trình được cho là được kiểm soát thống kê, hay đơn giản là “được kiểm soát”, khi độ biến động quá trình chỉ do nguyên nhân ngẫu nhiên. Khi mức độ biến động này được xác định, bất kỳ sai lệch nào so với mức này được giả định là do nguyên nhân ấn định cần được nhận biết và loại bỏ.
Kiểm soát thống kê quá trình là phương pháp luận về việc thiết lập và duy trì quá trình ở mức chấp nhận được và ổn định nhằm đảm bảo sự phù hợp của sản phẩm và dịch vụ với các yêu cầu quy định. Công cụ thống kê chính được sử dụng để thực hiện điều này là biểu đồ kiểm soát, là phương pháp trình bày bằng đồ thị và so sánh thông tin dựa trên chuỗi các quan trắc thể hiện trạng thái hiện tại của quá trình theo các giới hạn được thiết lập sau khi xem xét độ biến động vốn có của quá trình được gọi là năng lực quá trình. Phương pháp biểu đồ kiểm soát trước tiên giúp đánh giá xem quá trình đã đạt được hay duy trì ở trạng thái kiểm soát thống kê hay không. Khi ở trong trạng thái như vậy quá trình được coi là ổn định, có thể dự đoán được và có thể tiến hành phân tích sâu hơn khi khả năng của quá trình thỏa mãn các yêu cầu của khách hàng. Biểu đồ kiểm soát cũng có thể được sử dụng để cung cấp hồ sơ về đặc trưng chất lượng của đầu ra quá trình liên tục trong khi hoạt động của quá trình đang diễn ra. Biểu đồ kiểm soát hỗ trợ việc phát hiện các dạng biến động không tự nhiên trong dữ liệu dẫn đến các quá trình lặp lại và cung cấp chuẩn mực cho việc phát hiện sự thiếu kiểm soát thống kê. Việc sử dụng biểu đồ kiểm soát và phân tích cẩn thận dẫn đến hiểu biết tốt hơn về quá trình và thường giúp xác định những cách thức để thực hiện cải tiến có giá trị.
BIỂU ĐỒ KIỂM SOÁT - PHẦN 2: BIỂU ĐỒ KIỂM SOÁT SHEWHART
Control charts - Part 2: Shewhart control charts
1. Phạm vi áp dụng
Tiêu chuẩn này cung cấp hướng dẫn sử dụng và hiểu biết về cách tiếp cận biểu đồ kiểm soát
Shewhart với các phương pháp kiểm soát thống kê quá trình.
Tiêu chuẩn này chỉ sử dụng hệ thống biểu đồ Shewhart để xử lý các phương pháp kiểm soát thống kê quá trình. Một số tài liệu bổ sung phù hợp với cách tiếp cận Shewhart, như sử dụng các giới hạn cảnh báo, phân tích các kiểu xu thế và năng lực quá trình cũng được giới thiệu tóm tắt. Tuy nhiên, có một số loại biểu đồ kiểm soát khác được mô tả khái quát trong TCVN 9945-1 (ISO 7870-1).
2. Tài liệu viện dẫn
Các tài liệu viện dẫn dưới đây rất cần thiết cho việc áp dụng tiêu chuẩn này. Đối với các tài liệu ghi năm công bố thì áp dụng bản được nêu. Đối với các tài liệu không ghi năm công bố thì áp dụng bản mới nhất, bao gồm cả các sửa đổi.
TCVN 8006-4 (ISO 16269-4), Giải thích các dữ liệu thống kê - Phần 4: Phát hiện và xử lý các giá trị bất thường
TCVN 8244-2 (ISO 3534-2), Thống kê học - Từ vựng và ký hiệu - Phần 2: Thống kê ứng dụng
TCVN 9603 (ISO 5479), Giải thích các dữ liệu thống kê - Kiểm nghiệm sai lệch so với phân bố chuẩn
TCVN 9944 (ISO 22514) (tất cả các phần), Phương pháp thống kê trong quản lý quá trình - Năng lực và hiệu năng
3. Thuật ngữ, định nghĩa và ký hiệu
3.1. Khái quát
Tiêu chuẩn này sử dụng các thuật ngữ và định nghĩa nêu trong TCVN 8244-2:2010 (ISO 3534-2:2006).
3.2. Ký hiệu
CHÚ THÍCH: Hướng dẫn của ISO/IEC nghiêng về cách sử dụng SPC thông thường liên quan đến sự khác biệt giữa các thuật ngữ viết tắt và các ký hiệu. Trong tiêu chuẩn quốc gia thuật ngữ viết tắt và ký hiệu của nó có thể khác nhau về phông chữ và cách trình bày. Để phân biệt giữa thuật ngữ viết tắt và các ký hiệu, thuật ngữ viết tắt được trình bày bằng phông chữ Arial thẳng đứng và ký hiệu dùng phông chữ Times New Roman in nghiêng, khi thích hợp. Trong khi thuật ngữ viết tắt có thể bao gồm nhiều chữ cái, thì ký hiệu chỉ bao gồm một chữ cái. Ví dụ, chữ viết tắt thông thường của giới hạn kiểm soát trên, UCL, là hợp lệ nhưng ký hiệu của nó trong phương trình là UCL. Lý do là để tránh hiểu sai về các chữ cái ghép là thể hiện phép nhân.
Trong trường hợp thực tế quen dùng đã lâu khi ký hiệu và/hoặc thuật ngữ viết tắt có nghĩa khác nhau trong ứng dụng khác nhau, thì cần phải sử dụng bộ giới hạn trường đối tượng, á ñ, để phân biệt chúng. Điều này tránh sự không thống nhất cho những người thực hành thông qua việc đưa ra thuật ngữ viết tắt và các ký hiệu không quen thuộc trong lĩnh vực cụ thể không giống như các văn bản liên quan, sổ tay làm việc và các chương trình phần mềm chuyên dụng. Ví dụ thuật ngữ viết tắt “R” và ký hiệu “R” có nghĩa khác nhau theo các lĩnh vực của hệ thống đo lường và kiểm soát thống kê quá trình (SPC) và lấy mẫu chấp nhận. Ký hiệu “R” là khác nhau do đó:
R áhệ thống đo lườngñ giới hạn độ tái lập
R áSPC và lấy mẫu chấp nhậnñ độ rộng
Tiêu chuẩn này sử dụng các ký hiệu dưới đây.
n Cỡ nhóm con; số quan trắc mẫu trên mỗi nhóm con
k Số nhóm con
L Giới hạn quy định dưới
LCL Giới hạn kiểm soát dưới
U Giới hạn quy định trên
UCL Giới hạn kiểm soát trên
X Đặc trưng chất lượng được đo (các giá trị riêng rẽ được biểu thị bằng X1, X2, X3,...). Đôi khi ký hiệu Y được dùng thay cho X
![]() (X
gạch ngang) Trung bình nhóm con
(X
gạch ngang) Trung bình nhóm con
![]() (X
hai gạch ngang) Giá trị trung bình của các trung bình nhóm con
(X
hai gạch ngang) Giá trị trung bình của các trung bình nhóm con
m Giá trị trung bình thực của quá trình
s Giá trị độ lệch chuẩn thực của quá trình
s0 Giá trị đã cho của s
![]() Trung vị
của nhóm con
Trung vị
của nhóm con
![]() Trung bình các trung vị của nhóm con
Trung bình các trung vị của nhóm con
![]() Độ rộng
nhóm con: hiệu giữa quan trắc lớn nhất và quan trắc nhỏ nhất của nhóm con
Độ rộng
nhóm con: hiệu giữa quan trắc lớn nhất và quan trắc nhỏ nhất của nhóm con
R Trung bình các giá trị R đối với tất cả nhóm con
Rm Độ rộng trượt: giá trị tuyệt đối của hiệu hai giá trị liên tiếp çX1 - X2ççX2 - X3ç, v.v....
![]() Trung bình (n-1)
giá trị Rm trong tập n giá trị quan trắc
Trung bình (n-1)
giá trị Rm trong tập n giá trị quan trắc
s Độ lệch chuẩn mẫu thu được từ các giá trị trong nhóm con
![]()
![]() Trung bình
độ lệch chuẩn mẫu nhóm con
Trung bình
độ lệch chuẩn mẫu nhóm con
![]() Giá trị độ
lệch chuẩn ước lượng của quá trình
Giá trị độ
lệch chuẩn ước lượng của quá trình
p Tỷ lệ hoặc phần đơn vị trong nhóm con với sự phân loại nhất định
![]() Giá trị
trung bình của tỷ lệ hoặc phần
Giá trị
trung bình của tỷ lệ hoặc phần
np Số đơn vị với sự phân loại nhất định trong nhóm con
p0 Giá trị p đã cho
np0 Giá trị np đã cho (đối với p0 đã cho)
c Số sự cố trong nhóm con
c0 Giá trị c đã cho
![]() Giá trị
trung bình của giá trị c đối với tất cả nhóm con
Giá trị
trung bình của giá trị c đối với tất cả nhóm con
u Số sự cố trên một đơn vị trong nhóm con
![]() Giá trị
trung bình của các giá trị u
Giá trị
trung bình của các giá trị u
u0 Giá trị u đã cho
4 Bản chất của biểu đồ Shewhart
Biểu đồ kiểm soát Shewhart là biểu đồ được sử
dụng để thể hiện thước đo thống kê thu được từ dữ liệu định lượng hoặc dữ liệu
định tính. Biểu đồ kiểm soát yêu cầu dữ liệu từ các nhóm con hợp lý được lấy
tại các khoảng xấp xỉ đều nhau từ quá trình. Các khoảng có thể được xác định
theo thời gian (ví dụ từng giờ) hoặc theo lượng (từng lô). Thông thường, dữ liệu
thu được từ quá trình dưới dạng mẫu hoặc nhóm con bao gồm cùng đặc trưng quá trình,
sản phẩm hoặc dịch vụ có cùng đơn vị đo và cùng cỡ nhóm con. Từ mỗi nhóm con rút
ra một hoặc nhiều đặc trưng nhóm con như trung bình nhóm con,![]() , và độ rộng nhóm con, R, độ lệch
chuẩn, s, hoặc đặc trưng đếm được như tỷ lệ đơn vị thuộc loại nhất định.
, và độ rộng nhóm con, R, độ lệch
chuẩn, s, hoặc đặc trưng đếm được như tỷ lệ đơn vị thuộc loại nhất định.
Biểu đồ kiểm soát Shewhart là đồ thị các giá trị của đặc trưng nhóm con nhất định tương ứng với số nhóm con. Nó bao gồm đường trung tâm (CL) tại giá trị quy chiếu của đặc trưng được vẽ. Để xác định việc có ở trạng thái kiểm soát thống kê hay không, giá trị quy chiếu thường là trung bình của thước đo thống kê đang xét. Đối với kiểm soát quá trình, giá trị quy chiếu có thể là giá trị lâu dài của đặc trưng như được công bố trong các quy định kỹ thuật sản phẩm; giá trị của đặc trưng được vẽ dựa trên kinh nghiệm trước đó về quá trình khi ở trạng thái kiểm soát thống kê, hoặc dựa trên giá trị đích của sản phẩm hoặc dịch vụ.
Biểu đồ kiểm soát có hai đường giới hạn được xác định bằng thống kê, mỗi đường nằm về một phía đường trung tâm, được gọi là giới hạn kiểm soát trên (UCL) và giới hạn kiểm soát dưới (LCL)
(xem Hình 1).
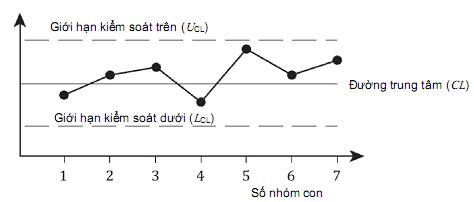
Hình 1 - Dạng biểu đồ kiểm soát
Các giới hạn kiểm soát trên biểu đồ Shewhart cách đường trung tâm một khoảng 3 sigma về mỗi phía, trong đó sigma đã biết hoặc độ lệch chuẩn của tổng thể được ước lượng. Shewhart chọn sử dụng giới hạn 3 sigma trên cơ sở ý nghĩa kinh tế về cân bằng chi phí trong việc tìm kiếm các vấn đề trong quá trình khi các vấn đề đó không tồn tại và sẽ không tìm thấy các vấn đề như vậy khi quá trình không hoạt động như nó cần phải thực hiện. Đặt các giới hạn quá gần đường trung tâm sẽ dẫn đến nhiều tìm kiếm đối với các vấn đề không tồn tại, còn đặt các giới hạn quá xa sẽ làm tăng rủi ro không phát hiện các vấn đề trong quá trình khi chúng vẫn tồn tại. Với giả định là thống kê đồ thị có phân bố xấp xỉ chuẩn, giới hạn 3 sigma cho thấy rằng khoảng 99,7 % giá trị của thống kê sẽ nằm trong giới hạn kiểm soát, với điều kiện quá trình được kiểm soát thống kê. Nói một cách khác, có rủi ro xấp xỉ 0,3 %, hoặc trung bình ba phần nghìn, điểm được vẽ nằm ngoài giới hạn kiểm soát trên hoặc dưới khi quá trình được kiểm soát. Từ “xấp xỉ” được dùng vì sự lệch khỏi các giả định cơ sở như dạng phân bố của dữ liệu sẽ ảnh hưởng đến giá trị xác suất. Trong thực tế, lựa chọn giới hạn k sigma thay cho giới hạn 3 sigma phụ thuộc vào chi phí nghiên cứu và thực hiện hành động thích hợp so với hiệu quả của việc không thực hiện hành động.
Cần chú ý rằng một số chuyên gia ưa dùng hệ số 3,09 thay cho 3 để có giá trị xác suất danh nghĩa 0,2 % hay trung bình một phần nghìn quan trắc giả, nhưng Shewhart chọn 3 để không phải xem xét các xác suất chính xác. Tương tự, một số chuyên gia sử dụng các giá trị xác suất thực tế cho biểu đồ dựa trên phân bố không chuẩn như đối với độ rộng và tỷ lệ không phù hợp. Một lần nữa, biểu đồ kiểm soát Shewhart sử dụng giới hạn ±3 sigma trên quan điểm nhấn mạnh đến ý nghĩa thực tiễn.
Khả năng vi phạm các giới hạn là một sự kiện ngẫu nhiên chứ không phải tín hiệu thực được xem xét nhỏ đến mức cần thực hiện hành động khi có điểm nằm ngoài giới hạn. Vì hành động là cần thiết tại điểm này nên giới hạn kiểm soát 3 sigma đôi khi được gọi là “giới hạn hành động”.
Nhiều khi việc đánh dấu giới hạn 2 sigma trên biểu đồ cũng có lợi thế. Lúc đó bất cứ giá trị mẫu nào nằm ngoài giới hạn 2 sigma có thể coi là cảnh báo về tình huống mất kiểm soát sắp xảy ra. Vì vậy, đường giới hạn 2 sigma đôi khi được gọi là “giới hạn cảnh báo”. Trong khi không cần hành động nào sau khi cảnh báo này được đưa ra trên biểu đồ kiểm soát, một số người dùng có thể muốn chọn ngay một nhóm con khác cùng cỡ để xác định xem có cần hành động khắc phục hay không.
Khi đánh giá tình trạng của quá trình bằng cách sử dụng biểu đồ kiểm soát, hai loại sai lầm có thể xảy ra. Loại sai lầm thứ nhất xảy ra khi quá trình liên quan thực sự ở trạng thái kiểm soát nhưng điểm vẽ đồ thị nằm ngoài giới hạn kiểm soát do ngẫu nhiên. Do vậy, biểu đồ đã đưa ra tín hiệu dẫn đến kết luận sai là quá trình nằm ngoài sự kiểm soát. Khi đó sẽ phát sinh chi phí để cố gắng tìm ra nguyên nhân của vấn đề không tồn tại.
Sai lầm loại hai xảy ra khi quá trình nằm ngoài sự kiểm soát nhưng điểm được vẽ đồ thị nằm trong giới hạn kiểm soát do ngẫu nhiên. Trong trường hợp này, biểu đồ không đưa ra tín hiệu và được kết luận sai là quá trình nằm trong kiểm soát thống kê. Cũng có thể mất chi phí đáng kể do không phát hiện được thay đổi trong vị trí quá trình hoặc độ biến động đã xảy ra, kết quả của sai lầm này có thể là sản xuất ra sản phẩm không phù hợp. Rủi ro của loại sai lầm này là hàm số của 3 yếu tố: độ rộng của giới hạn kiểm soát, cỡ mẫu và mức độ quá trình nằm ngoài sự kiểm soát. Nhìn chung, do không thể biết được mức độ thay đổi quá trình nên ít có khả năng xác định được mức độ thực tế của rủi ro sai lầm loại này.
Vì nhìn chung sẽ không thể đưa ra ước lượng có ý nghĩa về rủi ro và chi phí của sai lầm loại hai này trong bất kỳ tình huống nhất định nào, nên hệ thống biểu đồ kiểm soát Shewhart được thiết kế để kiểm soát sai lầm loại một. Khi tính chuẩn được giả định và giới hạn kiểm soát 3 sigma được sử dụng, mức độ của sai lầm loại một này là 0,3 %. Nói cách khác, sai lầm này chỉ xảy ra khoảng 3 lần trong 1000 mẫu khi quá trình được kiểm soát.
Trong thực tế, lựa chọn giới hạn k sigma thay cho giới hạn 3 sigma phụ thuộc vào chi phí nghiên cứu và thực hiện hành động thích hợp so với hệ quả của việc không thực hiện hành động.
Khi quá trình được kiểm soát thống kê, biểu đồ kiểm soát cung cấp phương pháp, theo một nghĩa nào đó là tương tự với kiểm nghiệm liên tục giả thuyết "không" về thống kê là quá trình chưa thay đổi và vẫn trong trạng thái kiểm soát thống kê. Trong giai đoạn 1, vì thường không chắc chắn về những vấn đề như phấn bố xác suất của đặc trưng quan tâm, tính ngẫu nhiên và độ lệch cụ thể của đặc trưng quá trình so với giá trị đích liên quan thường không được xác định trước nên biểu đồ kiểm soát Shewhart không được coi là kiểm nghiệm giả thuyết theo nghĩa thuần túy nhất. Walter Shewhart nhấn mạnh tính hữu ích thực nghiệm của biểu đồ kiểm soát đối với việc nhận biết sai lệch so với quá trình “được kiểm soát” chứ không nhấn mạnh việc giải thích xác suất.
Khi giá trị được vẽ nằm ngoài một trong hai giới hạn kiểm soát, hoặc dãy các giá trị thể hiện dạng bất thường như mô tả trong Điều 8, trạng thái kiểm soát thống kê không còn được chấp nhận nữa. Khi điều này xảy ra, cần bắt đầu nghiên cứu để xác định nguyên nhân ấn định được và có thể dừng hoặc điều chỉnh quá trình. Khi nguyên nhân ấn định được xác định và loại bỏ thì có thể tiếp tục quá trình. Như thảo luận ở trên, trong trường hợp hiếm gặp, không thể tìm thấy nguyên nhân ấn định được và phải kết luận rằng điểm nằm ngoài giới hạn biểu thị sự xuất hiện biến cố rất hiếm, nguyên nhân ngẫu nhiên, dẫn đến giá trị nằm ngoài giới hạn kiểm soát mặc dù quá trình đang được kiểm soát.
Khi quá trình được nghiên cứu lần đầu tiên với mục tiêu đưa quá trình về trạng thái kiểm soát thống kê, cần sử dụng dữ liệu quá khứ thu được trước đó từ quá trình hoặc thực hiện thu thập dữ liệu mới từ loạt mẫu trước khi cố gắng lập biểu đồ kiểm soát. Giai đoạn hồi cứu này khi các tham số biểu đồ kiểm soát được thiết lập thường được gọi là Giai đoạn 1. Cần tìm đủ dữ liệu để có được ước lượng tin cậy của đường trung tâm và giới hạn kiểm soát đối với biểu đồ kiểm soát. Giới hạn kiểm soát được thiết lập trong Giai đoạn 1 là giới hạn kiểm soát thử nghiệm vì chúng dựa trên dữ liệu được thu thập khi quá trình không được kiểm soát. Việc xác định các nguyên nhân chính xác cho các tín hiệu do biểu đồ kiểm soát đưa ra ở giai đoạn này có thể khó khăn vì thiếu thông tin về lịch sử đặc trưng hoạt động của quá trình. Tuy nhiên, khi có thể xác định nguyên nhân đặc biệt của độ biến động và thực hiện hành động khắc phục, cần loại khỏi xem xét các dữ liệu sau từ quá trình chịu ảnh hưởng của nguyên nhân đặc biệt và xác định lại tham số biểu đồ kiểm soát. Tiếp tục lặp lại quy trình này cho đến khi biểu đồ kiểm soát thử nghiệm không cho thấy tín hiệu và quá trình có thể được coi là nằm trong trạng thái kiểm soát và do đó biểu đồ kiểm soát ổn định và có thể dự đoán được. Vì một số dữ liệu có thể đã được loại khỏi xem xét trong Giai đoạn 1 nên người sử dụng có thể thu được dữ liệu bổ sung từ quá trình để duy trì độ tin cậy của các ước lượng tham số.
Khi kiểm soát thống kê được thiết lập, đường trung tâm và các giới hạn kiểm soát của biểu đồ kiểm soát thử nghiệm cuối cùng xác định trong Giai đoạn 1 được lấy làm tham số trong biểu đồ kiểm soát để tiếp tục theo dõi quá trình. Giờ đây mục tiêu, trong Giai đoạn 2, là duy trì quá trình ở trạng thái kiểm soát cũng như nhận biết nhanh nguyên nhân đặc biệt có thể ảnh hưởng đến quá trình theo thời gian. Cần thừa nhận rằng việc chuyển từ Giai đoạn 1 đến Giai đoạn 2 có thể mất nhiều thời gian và khó khăn. Tuy nhiên, điều này là quan trọng vì nếu không loại bỏ được nguyên nhân đặc biệt của độ biến động sẽ dẫn đến ước lượng quá mức độ biến động quá trình. Trong trường hợp này biểu đồ kiểm soát có các giới hạn kiểm soát cách nhau quá xa dẫn đến biểu đồ kiểm soát không đủ nhạy trong việc phát hiện sự xuất hiện của nguyên nhân đặc biệt.
Chi tiết về quy trình thiết lập biểu đồ kiểm soát đối với quá trình được mô tả dưới đây.
5. Các loại biểu đồ kiểm soát
Biểu đồ kiểm soát Shewhart về cơ bản có hai loại: biểu đồ kiểm soát định lượng và biểu đồ kiểm soát định tính. Với mỗi biểu đồ kiểm soát, có hai trường hợp khác nhau:
a) khi không cho giá trị tham số quá trình quy định trước;
b) khi cho giá trị tham số quá trình quy định trước.
Giá trị quá trình quy định trước có thể quy định các yêu cầu hoặc giá trị đích hoặc giá trị ước lượng của tham số đã được xác định trong thời gian dài từ dữ liệu khi quá trình trong trạng thái kiểm soát.
5.1. Biểu đồ kiểm soát khi không cho giá trị quy định trước
Mục đích ở đây là phát hiện xem giá trị quan trắc
của đặc trưng được vẽ, như ![]() , R hoặc bất kỳ
thống kê nào có sai khác nhau một lượng lớn hơn lượng nhận được chỉ do ngẫu nhiên
hay không. Biểu đồ kiểm soát sẽ được xây dựng chỉ bằng cách sử dụng dữ liệu
được thu thập từ mẫu của quá trình. Biểu đồ kiểm soát được sử dụng cho việc
phát hiện độ biến động do nguyên nhân không phải ngẫu nhiên với mục đích là đưa
quá trình về trạng thái kiểm soát thống kê.
, R hoặc bất kỳ
thống kê nào có sai khác nhau một lượng lớn hơn lượng nhận được chỉ do ngẫu nhiên
hay không. Biểu đồ kiểm soát sẽ được xây dựng chỉ bằng cách sử dụng dữ liệu
được thu thập từ mẫu của quá trình. Biểu đồ kiểm soát được sử dụng cho việc
phát hiện độ biến động do nguyên nhân không phải ngẫu nhiên với mục đích là đưa
quá trình về trạng thái kiểm soát thống kê.
5.2. Biểu đồ kiểm soát đối với trường hợp đã cho các giá trị quy định trước
Mục đích ở đây là nhận biết giá trị quan trắc
của ![]() , s, v.v..., đối với một số
nhóm con, mỗi nhóm gồm n quan trắc, có khác với giá trị đã cho tương ứng của m0, s0, v.v... một lượng
lớn hơn lượng nhận được chỉ do nguyên nhân ngẫu nhiên hay không. Sự khác nhau giữa
biểu đồ có các giá trị tham số đã cho với các biểu đồ khi không cho giá trị quy
định trước là yêu cầu bổ sung liên quan đến việc xác định vị trí tâm và độ biến
động của quá trình. Giá trị quy định có thể dựa trên kinh nghiệm thu được khi
sử dụng biểu đồ kiểm soát không có thông tin trước đó hoặc giá trị quy định.
Chúng cũng có thể dựa trên giá trị kinh tế được thiết lập khi xem xét nhu cầu đối
với dịch vụ và chi phí sản xuất hoặc giá trị danh nghĩa ấn định bởi quy định
sản phẩm.
, s, v.v..., đối với một số
nhóm con, mỗi nhóm gồm n quan trắc, có khác với giá trị đã cho tương ứng của m0, s0, v.v... một lượng
lớn hơn lượng nhận được chỉ do nguyên nhân ngẫu nhiên hay không. Sự khác nhau giữa
biểu đồ có các giá trị tham số đã cho với các biểu đồ khi không cho giá trị quy
định trước là yêu cầu bổ sung liên quan đến việc xác định vị trí tâm và độ biến
động của quá trình. Giá trị quy định có thể dựa trên kinh nghiệm thu được khi
sử dụng biểu đồ kiểm soát không có thông tin trước đó hoặc giá trị quy định.
Chúng cũng có thể dựa trên giá trị kinh tế được thiết lập khi xem xét nhu cầu đối
với dịch vụ và chi phí sản xuất hoặc giá trị danh nghĩa ấn định bởi quy định
sản phẩm.
Tốt nhất là các giá trị quy định cần được xác định thông qua khảo sát dữ liệu ban đầu, được giả định là điển hình cho tất cả dữ liệu sau này. Giá trị quy định cần thích hợp với độ biến động quá trình vốn có cho hoạt động hiệu quả của biểu đồ kiểm soát. Biểu đồ kiểm soát dựa trên giá trị quy định trước như vậy được sử dụng cụ thể trong hoạt động quá trình để kiểm soát quá trình và duy trì tính đồng đều của sản phẩm hoặc dịch vụ ở mức độ mong muốn.
5.3. Các loại biểu đồ kiểm soát định lượng và định tính
Các biểu đồ kiểm soát sau đây được xem xét:
a) Biểu đồ kiểm soát định lượng sử dụng khi phép đo theo thang đo liên tục:
1) biểu đồ trung bình (![]() ) và biểu đồ độ rộng (R) hoặc độ
lệch chuẩn (s);
) và biểu đồ độ rộng (R) hoặc độ
lệch chuẩn (s);
2) biểu đồ cá thể (X) và độ rộng trượt (Rm);
3) biểu đồ trung vị ![]() và
độ rộng (R).
và
độ rộng (R).
b) Biểu đồ kiểm soát định tính sử dụng khi phép đo là dữ liệu đếm được hoặc dữ liệu phân loại:
1) biểu đồ p với số đơn vị thuộc phân loại nhất định trên tổng số đơn vị trong mẫu được thể hiện bằng tỷ lệ hoặc phần trăm;
2) biểu đồ np với số đơn vị thuộc phân loại nhất định trong đó cỡ mẫu không đổi;
3) biểu đồ c với số sự cố khi cơ hội xuất hiện là cố định;
4) biểu đồ u với số sự cố trên đơn vị khi cơ hội là thay đổi.
Hình 2 biểu thị quá trình lựa chọn biểu đồ kiểm soát thích hợp dùng cho tình huống nhất định.
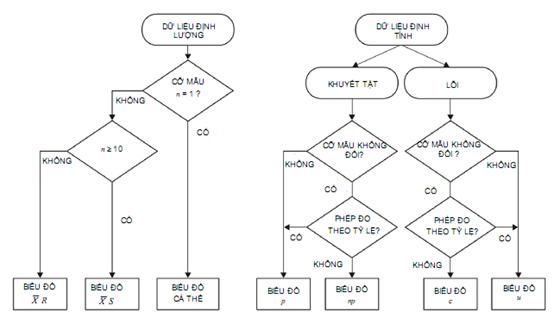
Hình 2 - Các loại biểu đồ kiểm soát
6. Biểu đồ kiểm soát định lượng
![]() Biểu đồ kiểm soát định
lượng hoặc biểu đồ dữ liệu định lượng và đặc biệt là dạng thông thường nhất của
chúng, biểu đồ
Biểu đồ kiểm soát định
lượng hoặc biểu đồ dữ liệu định lượng và đặc biệt là dạng thông thường nhất của
chúng, biểu đồ ![]() và R thể hiện ứng dụng
cổ điển trong việc lập biểu đồ kiểm soát để kiểm soát quá trình.
và R thể hiện ứng dụng
cổ điển trong việc lập biểu đồ kiểm soát để kiểm soát quá trình.
Biểu đồ kiểm soát định lượng đặc biệt hữu ích vì một số lý do sau:
a) Hầu hết các quá trình và kết quả của chúng có đặc trưng đo được, do đó tạo ra dữ liệu định lượng, vì vậy khả năng áp dụng rộng.
b) Biểu đồ định lượng có nhiều thông tin hơn biểu đồ định tính vì thông tin cụ thể về trung bình quá trình và phương sai thu được trực tiếp. Biểu đồ định lượng thường sẽ báo hiệu vấn đề trong quá trình trước khi quá trình sản xuất ra các cá thể không phù hợp.
c) Mặc dù thu được một cá thể dữ liệu đo được thường tốn kém hơn nhận được một cá thể dữ liệu đạt/không đạt, cỡ nhóm con cần thiết đối với mẫu định lượng hầu như luôn nhỏ hơn nhiều so với cỡ mẫu định tính nhưng cho hiệu quả giám sát tương đương. Điều này giúp giảm tổng chi phí kiểm tra trong một số trường hợp và rút ngắn khoảng thời gian từ lúc xuất hiện vấn đề trong quá trình đến khi có hành động điều chỉnh.
d) Các biểu đồ này sẽ đưa ra các phương pháp trực quan để đánh giá trực tiếp hiệu năng quá trình không xét đến các quy định. Nhìn kỹ vào biểu đồ định lượng cùng với việc xem xét các biểu đồ tần số ở những khoảng thích hợp thường sẽ dẫn đến các ý tưởng hoặc gợi ý để cải tiến quá trình.
Đối với tất cả các ứng dụng biểu đồ kiểm soát
định lượng được xem xét trong tiêu chuẩn này, giả định phân bố đặc trưng chất lượng
là phân bố chuẩn (Gauss) và sai lệch so với giả định này sẽ ảnh hưởng đến hiệu năng
của biểu đồ. Các hệ số sử dụng để tính giới hạn kiểm soát được rút ra bằng cách
sử dụng giả định về tính chuẩn. Vì hầu hết các giới hạn kiểm soát được sử dụng như
hướng dẫn thực tế khi đưa ra quyết định, nên việc độ lệch so với tính chuẩn nhỏ
hợp lý sẽ không gây ra vấn đề gì. Trong bất cứ trường hợp nào, theo định lý
giới hạn trung tâm, trung bình có xu hướng phân bố chuẩn thậm chí khi các quan trắc
riêng lẻ không phân bố chuẩn; điều này làm cho hợp lý khi đánh giá kiểm soát để
giả định tính chuẩn đối với biểu đồ ![]() , ngay cả với cỡ
mẫu nhỏ như 4 hoặc 5. Khi xử lý các quan trắc riêng lẻ với mục đích nghiên cứu năng
lực, dạng thực của phân bố là quan trọng. Nên kiểm tra định kỳ về tính hợp lệ
của những lý thuyết này, đặc biệt trong việc đảm bảo rằng chỉ sử dụng dữ liệu
từ một tổng thể duy nhất. Cần lưu ý rằng phân bố của độ rộng và độ lệch chuẩn
không phải là phân bố chuẩn. Mặc dù cần giả định tính chuẩn khi xác định các hằng
số cho việc tính giới hạn kiểm soát đối với biểu đồ độ rộng hoặc độ lệch chuẩn,
dữ liệu quá trình sai lệch vừa phải so với tính chuẩn không phải là vấn đề
chính trong việc sử dụng các biểu đồ này làm quy trình quyết định thực nghiệm.
, ngay cả với cỡ
mẫu nhỏ như 4 hoặc 5. Khi xử lý các quan trắc riêng lẻ với mục đích nghiên cứu năng
lực, dạng thực của phân bố là quan trọng. Nên kiểm tra định kỳ về tính hợp lệ
của những lý thuyết này, đặc biệt trong việc đảm bảo rằng chỉ sử dụng dữ liệu
từ một tổng thể duy nhất. Cần lưu ý rằng phân bố của độ rộng và độ lệch chuẩn
không phải là phân bố chuẩn. Mặc dù cần giả định tính chuẩn khi xác định các hằng
số cho việc tính giới hạn kiểm soát đối với biểu đồ độ rộng hoặc độ lệch chuẩn,
dữ liệu quá trình sai lệch vừa phải so với tính chuẩn không phải là vấn đề
chính trong việc sử dụng các biểu đồ này làm quy trình quyết định thực nghiệm.
Biểu đồ định lượng có thể mô tả dữ liệu quá trình về độ trải (độ biến động quá trình) và vị trí (trung bình quá trình). Vì thế biểu đồ kiểm soát định lượng luôn được chuẩn bị và phân tích theo cặp - một biểu đồ cho vị trí và biểu đồ kia cho độ trải. Biểu đồ độ trải thường được phân tích trước, vì nó đưa ra nguyên nhân và lý giải cho việc ước lượng độ lệch chuẩn quá trình. Ước lượng độ lệch chuẩn quá trình thu được có thể sử dụng cho việc thiết lập các giới hạn kiểm soát đối với biểu đồ vị trí.
Có thể vẽ mỗi biểu đồ bằng cách sử dụng các giới hạn kiểm soát được ước lượng, trong trường hợp các giới hạn dựa trên thông tin có trong dữ liệu mẫu được vẽ trên biểu đồ, hoặc các giới hạn kiểm soát quy định trước dựa trên giá trị quy định được chấp nhận phù hợp với thước đo thống kê vẽ trên biểu đồ. Chỉ số dưới “0” được sử dụng trong Bảng 1 và Bảng 3 để biểu thị giá trị quy định, như m0 đối với trung bình quá trình quy định hoặc s0 với độ lệch chuẩn quá trình quy định.
Dưới đây là các biểu đồ kiểm soát định lượng được sử dụng phổ biến nhất.
6.1. Biểu đồ trung bình (![]() ) và biểu đồ độ rộng (R) hoặc biểu đồ trung
bình (
) và biểu đồ độ rộng (R) hoặc biểu đồ trung
bình (![]() )và biểu đồ độ lệch chuẩn (s)
)và biểu đồ độ lệch chuẩn (s)
Biểu đồ ![]() và
R có thể được sử dụng khi cỡ mẫu nhóm con nhỏ hoặc tương đối nhỏ, thường
là nhỏ hơn 10. Biểu đồ
và
R có thể được sử dụng khi cỡ mẫu nhóm con nhỏ hoặc tương đối nhỏ, thường
là nhỏ hơn 10. Biểu đồ ![]() và s
đặc biệt thích hợp trong trường hợp cỡ mẫu nhóm con lớn (n ³ 10), vì độ rộng ngày càng trở lên kém
hiệu quả trong việc ước lượng độ lệch chuẩn quá trình khi cỡ mẫu lớn hơn. Khi
có sẵn thiết bị điện tử để tính các giới hạn quá trình thì độ lệch chuẩn thích
hợp hơn.
và s
đặc biệt thích hợp trong trường hợp cỡ mẫu nhóm con lớn (n ³ 10), vì độ rộng ngày càng trở lên kém
hiệu quả trong việc ước lượng độ lệch chuẩn quá trình khi cỡ mẫu lớn hơn. Khi
có sẵn thiết bị điện tử để tính các giới hạn quá trình thì độ lệch chuẩn thích
hợp hơn.
Bảng 1 và Bảng 2 đưa ra công thức giới hạn kiểm soát và các hệ số cho từng biểu đồ kiểm soát định lượng này.
Bảng 1 - Công thức giới hạn kiểm soát đối với biểu đồ kiểm soát định lượng Shewhart
|
Thống kê |
Giới hạn kiểm soát ước lượng |
Giới hạn kiểm soát quy định trước |
||
|
|
Đường trung tâm |
UCL và LCL |
Đường trung tâm |
UCL và LCL |
|
|
X |
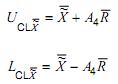
|
m0 |
m0 ± As0 |
|
R |
|
D4 |
d2s0 |
D2s0, D1s0 |
|
s |
s |
B4 |
c4s0 |
B6s0, B5s0 |
|
CHÚ THÍCH: m0 và s0 là các giá trị quy định trước. |
||||
Bảng 2 - Các hệ số dùng để tính đường biểu đồ kiểm soát
|
Các quan trắc trong nhóm con cỡ n |
Hệ số dùng cho giới hạn kiểm soát |
Hệ số dùng cho đường trung tâm |
|||||||||||
|
Biều đồ |
Biều đồ s |
Biều đồ R* |
Sừ dụng s* |
Sử dụng R* |
|||||||||
|
|
A |
A2 |
A3 |
B3 |
B4 |
B5 |
B6 |
D1 |
D2 |
D3 |
D4 |
C4 |
d2 |
|
2 |
2,121 |
1,880 |
2,659 |
- |
3,267 |
- |
2,606 |
- |
3,686 |
- |
3,267 |
0,7979 |
1,128 |
|
3 |
1,732 |
1,023 |
1,954 |
- |
2,568 |
- |
2,276 |
- |
4,358 |
- |
2,575 |
0,8862 |
1,693 |
|
4 |
1,500 |
0,729 |
1,628 |
- |
2,266 |
- |
2,088 |
- |
4,698 |
- |
2,282 |
0,9213 |
2,059 |
|
s |
1,342 |
0,577 |
1,427 |
- |
2,089 |
- |
1,964 |
- |
4,918 |
- |
2,114 |
0,9400 |
2,326 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
1,225 |
0,483 |
1,287 |
0,030 |
1,970 |
0,029 |
1,874 |
- |
5,079 |
- |
2,004 |
0,9515 |
2,534 |
|
7 |
1,134 |
0,419 |
1,182 |
0,118 |
1,882 |
0,113 |
1,806 |
0,205 |
5,204 |
0,076 |
1,924 |
0,9594 |
2,704 |
|
8 |
1,061 |
0,373 |
1,099 |
0,185 |
1,815 |
0,179 |
1,751 |
0,388 |
5,307 |
0,136 |
1,864 |
0,9650 |
2,847 |
|
9 |
1,000 |
0,337 |
1,032 |
0,239 |
1,761 |
0,232 |
1,707 |
0,547 |
5,394 |
0,184 |
1,816 |
0,9693 |
2,970 |
|
10 |
0,949 |
0,308 |
0,975 |
0.284 |
1,716 |
0,276 |
1,669 |
0,686 |
5,469 |
0,223 |
1,777 |
0,9727 |
3,078 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
0,905 |
0,285 |
0,927 |
0,321 |
1,679 |
0,313 |
1,637 |
0,811 |
5,535 |
0,256 |
1.744 |
0,9754 |
3,173 |
|
12 |
0,866 |
0,266 |
0,886 |
0,354 |
1,646 |
0,346 |
1,610 |
0,923 |
5,594 |
0,283 |
1,717 |
0,9776 |
3,258 |
|
13 |
0,832 |
0,249 |
0,850 |
0,382 |
1,618 |
0,374 |
1,585 |
1,025 |
5,647 |
0,307 |
1,693 |
0,9794 |
3,336 |
|
14 |
0,802 |
0,235 |
0,817 |
0,406 |
1,594 |
0,399 |
1,563 |
1,118 |
5,696 |
0,328 |
1,672 |
0,9810 |
3,407 |
|
15 |
0,775 |
0,223 |
0,789 |
0,428 |
1,572 |
0,421 |
1,544 |
1,203 |
5,740 |
0,347 |
1,653 |
0,9823 |
3,472 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
16 |
0,750 |
0,212 |
0,763 |
0,448 |
1,552 |
0,440 |
1,526 |
1,282 |
5,782 |
0,363 |
1,637 |
0,9835 |
3,532 |
|
17 |
0,728 |
0,203 |
0,739 |
0,466 |
1,534 |
0,458 |
1,511 |
1,356 |
5,820 |
0,378 |
1,622 |
0,9845 |
3,588 |
|
18 |
0,707 |
0,194 |
0,718 |
0,482 |
1,518 |
0,475 |
1,496 |
1,424 |
5,856 |
0,391 |
1,609 |
0,9854 |
3,640 |
|
19 |
0,688 |
0,187 |
0,698 |
0,497 |
1,503 |
0,490 |
1,483 |
1,489 |
5,889 |
0,404 |
1,596 |
0,9862 |
3,689 |
|
20 |
0,671 |
0,180 |
0,680 |
0,510 |
1,490 |
0,504 |
1,470 |
1,549 |
5,921 |
0,415 |
1,585 |
0,9869 |
3,735 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
21 |
0,655 |
0,173 |
0,663 |
0,523 |
1,477 |
0,516 |
1,459 |
1,606 |
5,951 |
0,425 |
1,575 |
0,9876 |
3,778 |
|
22 |
0,640 |
0,167 |
0,647 |
0,534 |
1,466 |
0,528 |
1,448 |
1,660 |
5,979 |
0,435 |
1,567 |
0,9882 |
3,819 |
|
23 |
0,626 |
0,162 |
0,633 |
0,545 |
1,455 |
0,539 |
1,438 |
1,711 |
6,006 |
0,443 |
1,557 |
0,9887 |
3,858 |
|
24 |
0,612 |
0,157 |
0,619 |
0,555 |
1,445 |
0,549 |
1,429 |
1,759 |
6,032 |
0,452 |
1,548 |
0,9892 |
3,895 |
|
25 |
0,600 |
0,153 |
0,606 |
0,565 |
1,435 |
0,559 |
1,420 |
1,805 |
6,056 |
0,459 |
1,541 |
0,9896 |
3,931 |
|
: * Không khuyến nghị đối với cỡ mẫu n > 10. |
|||||||||||||
6.2. Biểu đồ kiểm soát cá thể (X) và biểu đồ kiểm soát độ rộng trượt (Rm)
Trong một số trường hợp kiểm soát quá trình, việc lựa chọn nhóm con hợp lý là không thể, không thực tế hoặc không có ý nghĩa. Khi đó cần đánh giá kiểm soát quá trình dựa trên các số đọc riêng bằng cách sử dụng biểu đồ X và biểu đồ Rm.
Trong trường hợp biểu đồ kiểm soát cá thể, vì
không có các nhóm con hợp lý để đưa ra ước lượng độ biến động nên giới hạn kiểm
soát được dựa trên thước đo độ biến động nhận được từ độ rộng trượt của hai
quan trắc liên tiếp. Độ rộng trượt là giá trị tuyệt đối của hiệu giữa cặp phép đo
liên tiếp trong dãy; nghĩa là giá trị tuyệt đối của hiệu phép đo đầu tiên và
phép đo thứ hai, sau đó là giữa phép đo thứ hai và thứ ba, v.v...Từ độ rộng
trượt, tính độ rộng trượt trung bình ![]() và sử dụng cho xây
dựng biểu đồ kiểm soát. Cũng từ toàn bộ dữ liệu, tính trung bình tổng thể
và sử dụng cho xây
dựng biểu đồ kiểm soát. Cũng từ toàn bộ dữ liệu, tính trung bình tổng thể ![]() . Bảng 3 đưa ra công thức giới hạn
kiểm soát với biểu đồ kiểm soát cá thể và biểu đồ kiểm soát độ rộng trượt.
. Bảng 3 đưa ra công thức giới hạn
kiểm soát với biểu đồ kiểm soát cá thể và biểu đồ kiểm soát độ rộng trượt.
Có một số cảnh báo đối với biểu đồ kiểm soát cá thể:
a) Biểu đồ cá thể không nhạy với các thay đổi quá trình như các biểu đồ dựa trên nhóm con.
b) Phải cẩn trọng trong việc giải thích biểu đồ cá thể nếu phân bố quá trình không phải là phân bố chuẩn.
c) Biểu đồ cá thể phân tách độ biến động quá trình từ trung bình chênh lệch liên tiếp giữa các quan trắc. Do đó hàm ý là dữ liệu tuân theo trình tự thời gian và không có sự thay đổi đáng kể nào xảy ra trong quá trình giữa các tập hợp hai cá thể liên tiếp bất kỳ nào. Không nên, ví dụ, thu thập dữ liệu từ hai đợt sản xuất lô sản phẩm hóa chất không liên tục và tính độ rộng trượt giữa lô cuối cùng của đợt đầu tiên và lô đầu tiên của đợt tiếp theo, nếu dây truyền sản xuất dừng lại ở giữa.
Bảng 3 - Công thức giới hạn kiểm soát đối với biểu đồ kiểm soát cá thể
|
Thống kê |
Giới hạn kiểm soát ước lượng |
Giới hạn kiểm soát quy định trước |
||
|
|
Đường trung tâm |
UCL và LCL |
Đường trung tâm |
UCL và LCL |
|
Cá thể, X |
|
|
m0 |
m0 ± 3s0 |
|
Độ rộng trượt, Rm |
|
3,267 |
1,128s0 |
3,686s0 0 |
|
CHÚ THÍCH 1: m0 và s0 là các giá trị quy định trước. CHÚ THÍCH 2: |
||||
6.3. Biểu đồ kiểm soát trung vị ![]()
Biểu đồ trung vị là lựa chọn khác của biểu đồ
![]() để kiểm soát vị trí quá trình khi
muốn giảm ảnh hưởng của các cực trị trong nhóm con. Đây có thể là trường hợp đối
với các nhóm con hình thành từ nhiều phép đo tự động các mẫu biến động cao như khi
đo độ bền kéo. Biểu đồ trung vị dễ sử dụng và không yêu cầu nhiều tính toán, đặc
biệt đối với các nhóm con cỡ nhỏ có số quan trắc lẻ. Điều này có thể làm tăng sự
chấp nhận cách tiếp cận biểu đồ kiểm soát của đông đảo nhân viên và những người
khác khi giá trị cá thể trong nhóm con được vẽ cùng trung vị của chúng trên một
biểu đồ. Khi đó biểu đồ cũng cho thấy độ trải kết quả quá trình và đưa ra hình ảnh
liên tục về độ biến động quá trình. Cần lưu ý rằng trong các điều kiện mất kiểm
soát, biểu đồ trung vị đưa ra đáp ứng chậm hơn so với biểu đồ
để kiểm soát vị trí quá trình khi
muốn giảm ảnh hưởng của các cực trị trong nhóm con. Đây có thể là trường hợp đối
với các nhóm con hình thành từ nhiều phép đo tự động các mẫu biến động cao như khi
đo độ bền kéo. Biểu đồ trung vị dễ sử dụng và không yêu cầu nhiều tính toán, đặc
biệt đối với các nhóm con cỡ nhỏ có số quan trắc lẻ. Điều này có thể làm tăng sự
chấp nhận cách tiếp cận biểu đồ kiểm soát của đông đảo nhân viên và những người
khác khi giá trị cá thể trong nhóm con được vẽ cùng trung vị của chúng trên một
biểu đồ. Khi đó biểu đồ cũng cho thấy độ trải kết quả quá trình và đưa ra hình ảnh
liên tục về độ biến động quá trình. Cần lưu ý rằng trong các điều kiện mất kiểm
soát, biểu đồ trung vị đưa ra đáp ứng chậm hơn so với biểu đồ ![]() .
.
Giới hạn kiểm soát đối với biểu đồ trung vị được tính theo hai cách: dùng trung vị của các trung vị nhóm con và trung vị của các độ rộng; hoặc dùng trung bình của các trung vị và trung bình của các độ rộng. Cách thứ hai, đơn giản và thuận tiện hơn, được đề cập trong tiêu chuẩn này.
Giới hạn kiểm soát được tính như dưới đây.
6.3.1. Biểu đồ trung vị
Đường trung tâm = ![]() =
trung bình của các trung vị nhóm con
=
trung bình của các trung vị nhóm con
Giá trị của hằng số A4 được cho trong Bảng 4.
Bảng 4 - Giá trị của A4
|
n |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
A4 |
1,880 |
1,187 |
0,796 |
0,691 |
0,548 |
0,508 |
0,433 |
0,412 |
0,362 |
6.3.2. Biểu đồ độ rộng
Biểu đồ độ rộng được xây dựng theo cách tương
tự như biểu đồ ![]() và biểu đồ R trong
6.1.
và biểu đồ R trong
6.1.
7. Quy trình kiểm soát và giải thích biểu đồ kiểm soát định lượng
Hệ thống biểu đồ Shewhart quy định rằng nếu vị
trí quá trình và độ biến động quá trình không đổi ở mức hiện tại, thì thống kê
cá thể được vẽ (ví dụ, ![]() , R, s) sẽ khác nhau ngẫu
nhiên và chúng hiếm khi nằm ngoài giới hạn kiểm soát. Cũng như vậy, không có xu
hướng hoặc kiểu diễn biến rõ ràng nào trong dữ liệu ngoài những điều xảy do
ngẫu nhiên. Biểu đồ vị trí chỉ ra vị trí của trung bình quá trình và chỉ ra
việc quá trình có ổn định về trung bình hay không. Ví dụ, biểu đồ
, R, s) sẽ khác nhau ngẫu
nhiên và chúng hiếm khi nằm ngoài giới hạn kiểm soát. Cũng như vậy, không có xu
hướng hoặc kiểu diễn biến rõ ràng nào trong dữ liệu ngoài những điều xảy do
ngẫu nhiên. Biểu đồ vị trí chỉ ra vị trí của trung bình quá trình và chỉ ra
việc quá trình có ổn định về trung bình hay không. Ví dụ, biểu đồ ![]() thể hiện độ biến động giữa các nhóm con
theo thời gian và được thiết kế để phát hiện độ trôi về trung bình giữa các nhóm
con. Biểu đồ s hoặc R thể hiện độ biến động trong nhóm con tại
một thời điểm nhất định và được thiết kế để phát hiện những thay đổi trong độ
biến động quá trình. Biểu đồ s hoặc R phải nằm trong sự kiểm soát
trước khi giải thích biểu đồ vị trí. Quy trình kiểm soát sau đây áp dụng cho biểu
đồ
thể hiện độ biến động giữa các nhóm con
theo thời gian và được thiết kế để phát hiện độ trôi về trung bình giữa các nhóm
con. Biểu đồ s hoặc R thể hiện độ biến động trong nhóm con tại
một thời điểm nhất định và được thiết kế để phát hiện những thay đổi trong độ
biến động quá trình. Biểu đồ s hoặc R phải nằm trong sự kiểm soát
trước khi giải thích biểu đồ vị trí. Quy trình kiểm soát sau đây áp dụng cho biểu
đồ ![]() và biểu đồ s (hoặc R).
Có thể sử dụng quy trình tương tự cho các biểu đồ kiểm soát khác bao gồm cả biểu
đồ cá thể (X) khi việc phân nhóm con hợp lý không thích hợp.
và biểu đồ s (hoặc R).
Có thể sử dụng quy trình tương tự cho các biểu đồ kiểm soát khác bao gồm cả biểu
đồ cá thể (X) khi việc phân nhóm con hợp lý không thích hợp.
7.1. Thu thập dữ liệu ban đầu
Thu thập nhóm con hợp lý ban đầu (xem 11.3)
từ quá trình theo các điều kiện hoạt động chuẩn. Tính s (hoặc R)
của mỗi nhóm con. Tính trung bình (![]() hoặc
hoặc ![]() ) của các thống kê nhóm con. Thông thường,
lấy ít nhất 25 nhóm con ban đầu để đảm bảo ước lượng tin cậy (
) của các thống kê nhóm con. Thông thường,
lấy ít nhất 25 nhóm con ban đầu để đảm bảo ước lượng tin cậy (![]() hoặc
hoặc ![]() )
của độ biến động quá trình và sau đó là các giới hạn kiểm soát.
)
của độ biến động quá trình và sau đó là các giới hạn kiểm soát.
7.2. Kiểm tra biểu đồ s (hoặc R)
Tính và vẽ đường trung tâm và các giới hạn kiểm soát thử của biểu đồ s (hoặc R). Kiểm tra các điểm dữ liệu theo các giới hạn kiểm soát thử cho các điểm nằm ngoài giới hạn kiểm soát hoặc các xu hướng hay dạng bất thường. Đối với mỗi dấu hiệu như vậy trên biểu đồ, tiến hành phân tích hoạt động của quá trình để cố gắng xác định và loại bỏ nguyên nhân ấn định được.
CHÚ THÍCH 1: Phân bố lấy mẫu của s và R đều không đối xứng quanh giá trị trung bình. Tuy nhiên, để xây dựng biểu đồ s và R đơn giản và dễ thực hiện, giới hạn 3 sigma đối xứng đã được chấp nhận rộng rãi. Sử dụng giới hạn kiểm soát dưới bằng 0 khi giới hạn dưới tính được là giá trị âm.
CHÚ THÍCH 2: Nếu không nhận biết được nguyên nhân ấn định được với điểm vẽ mất kiểm soát, thì cần giữ điểm đó để tính giới hạn kiểm soát.
7.3. Loại bỏ nguyên nhân ấn định được và sửa lại biểu đồ
Loại bỏ tất cả các nhóm con bị ảnh hưởng bởi nguyên nhân ấn định đã được nhận biết; sau đó tính lại và vẽ đường trung tâm và giới hạn kiểm soát được sửa đổi. Kiểm tra biểu đồ để xác định việc tất cả các điểm dữ liệu còn lại thể hiện được kiểm soát thống kê khi so sánh với các giới hạn sửa đổi; lặp lại trình tự xác định/tính lại nếu cần.
CHÚ THÍCH: Đảm bảo duy trì ít nhất 2/3 nhóm con. Thu thập thêm các nhóm con nếu cần.
7.4. Kiểm tra biểu đồ X
Khi độ lệch chuẩn (hoặc độ rộng) được kiểm
soát thống kê thì độ biến động quá trình (độ biến động trong nhóm con) được coi
là ổn định. Sau đó có thể phân tích trung bình để kiểm tra xem vị trí tâm quá
trình có thay đổi theo thời gian không. Tính và vẽ đường trung tâm và các giới
hạn kiểm soát của biểu đồ ![]() . Kiểm tra điểm dữ liệu
theo các giới hạn kiểm soát đối với các điểm nằm ngoài giới hạn kiểm soát hoặc các
xu hướng hay dạng bất thường. Loại bỏ mọi điểm mất kiểm soát tại đó nguyên nhân
ấn định đã được nhận biết, tính lại và vẽ đồ thị đường trung tâm và các giới
hạn kiểm soát được sửa đổi. Kiểm tra việc tất cả các điểm dữ liệu thể hiện được
kiểm soát thống kê khi so sánh với các giới hạn được sửa đổi, lặp lại trình tự
nhận biết/tính lại nếu cần.
. Kiểm tra điểm dữ liệu
theo các giới hạn kiểm soát đối với các điểm nằm ngoài giới hạn kiểm soát hoặc các
xu hướng hay dạng bất thường. Loại bỏ mọi điểm mất kiểm soát tại đó nguyên nhân
ấn định đã được nhận biết, tính lại và vẽ đồ thị đường trung tâm và các giới
hạn kiểm soát được sửa đổi. Kiểm tra việc tất cả các điểm dữ liệu thể hiện được
kiểm soát thống kê khi so sánh với các giới hạn được sửa đổi, lặp lại trình tự
nhận biết/tính lại nếu cần.
Bất kỳ nhóm con nào bị loại ra khi xây dựng biểu
đồ s (hoặc R) cũng phải loại ra khi xây dựng biểu đồ ![]()
CHÚ THÍCH 1: Việc loại bỏ các nhóm con thể hiện có điều kiện mất kiểm soát là để đảm bảo rằng các giới hạn kiểm soát được tính chỉ phản ánh độ biến động quá trình do nguyên nhân ngẫu nhiên.
CHÚ THÍCH 2: Các tình huống mất kiểm soát bị loại bỏ để xác định các giới hạn kiểm soát không được loại ra khỏi biểu đồ nhằm có được điểm mấu chốt cho việc biết biểu hiện của quá trình và nghiên cứu hỗ trợ.
7.5. Theo dõi liên tục quá trình
Khi kiểm soát thống kê đã được thiết lập sao cho không có tín hiệu nào trên biểu đồ, các giới hạn kiểm soát đã sửa đổi phải được điều chỉnh để theo dõi tiếp quá trình trong tương lai. Vì quá trình đã chứng tỏ ở trạng thái kiểm soát thống kê nên không cần thay đổi các giới hạn kiểm soát khi thu thập thêm các nhóm con trong giai đoạn theo dõi này. Tuy nhiên, có thể cập nhật các giới hạn kiểm soát theo thời gian hoặc bất cứ khi nào có sự thay đổi trong quá trình.
Trong trường hợp tín hiệu được đưa ra trên biểu đồ và nguyên nhân ấn định được xác định, việc loại bỏ chúng yêu cầu những thay đổi cơ bản cho quá trình, có thể hoặc nhiều khả năng cần quy trình nhận biết/tính lại được nêu trong 7.1 đến 7.4 để thiết lập lại kiểm soát quá trình.
8. Các phép kiểm nghiệm dạng đối với nguyên nhân biến động ấn định được
Dạng hệ thống hoặc không ngẫu nhiên trên biểu
đồ kiểm soát có thể chỉ ra độ trôi nhỏ hơn về trung bình quá trình hoặc độ biến
động quá trình mà những độ trôi này có thể không đủ lớn để bộc lộ nhanh chóng thành
các điểm nằm ngoài giới hạn kiểm soát. Nhà phân tích cần được cảnh báo về bất kỳ
dạng điểm nào trên biểu đồ có thể chỉ ra sự ảnh hưởng của nguyên nhân ấn định được
trong quá trình. Tập hợp các phép kiểm nghiệm dạng có thể được sử dụng cho việc
giải thích các dạng trong biểu đồ Shewhart ![]() và
biểu đồ X được thể hiện trên Hình 3 dưới dạng biểu đồ.
và
biểu đồ X được thể hiện trên Hình 3 dưới dạng biểu đồ.
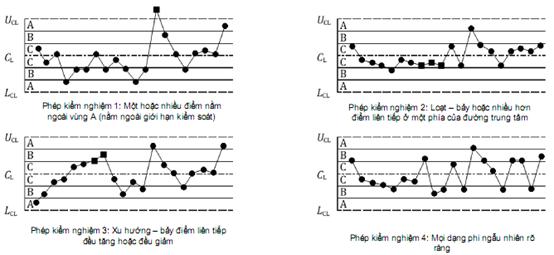
Hình 3 - Ví dụ về các phép kiểm nghiệm dạng đối với nguyên nhân ấn định được
CHÚ THÍCH 1: Một số ngành công nghiệp có thể sử dụng phép kiểm nghiệm dạng khác nhau.
CHÚ THÍCH 2: Liên quan đến biểu đồ p, np, c và u, nếu giới hạn kiểm soát dưới đã đặt về “không”, thì sẽ không thể tạo ra ba vùng 1 sigma dưới đường trung tâm.
Đối với mục đích của việc áp dụng phép kiểm nghiệm này, biểu đồ kiểm soát được chia đều thành ba vùng A, B và C trên mỗi phía của đường trung tâm, mỗi vùng rộng một sigma. Việc phân vùng này giúp người nghiên cứu dễ dàng phát hiện dạng sai lệch khỏi quá trình ổn định. Ví dụ, “dạng không ngẫu nhiên rõ ràng” của Phép kiểm nghiệm 4 có thể dễ dàng phát hiện hơn khi áp dụng phân vùng như vậy. Dự kiến khoảng 2/3 điểm được vẽ nằm tại vùng C trong quá trình ổn định. Nếu ít hơn 2/3 điểm được vẽ nằm trong vùng C, như được thể hiện trong Phép kiểm nghiệm 4 của Hình 3, thì cần quan tâm về dạng không ngẫu nhiên đó trên đồ thị. Dạng này đòi hỏi nghiên cứu thêm về nguyên nhân ấn định được tiềm ẩn trong quá trình. Dưới đây là các tín hiệu điển hình được đưa ra bằng bốn phép kiểm nghiệm trong Hình 3:
a) Phép kiểm nghiệm 1 báo hiệu sự xuất hiện của điều kiện mất kiểm soát.
b) Phép kiểm nghiệm 2 báo hiệu trung bình quá trình hoặc độ biến động đã dịch chuyển khỏi đường trung tâm.
c) Phép kiểm nghiệm 3 báo hiệu xu hướng tuyến tính hệ thống trong quá trình.
d) Phép kiểm nghiệm 4 báo hiệu dạng không ngẫu nhiên hoặc chu kỳ trong quá trình.
Xem Nelson, L.S (1984)[2] và Nelson, L.S (1985) [3] đối với thảo luận đầy đủ hơn về các phép kiểm nghiệm này. Ví dụ được đưa ra trong Phụ lục B.
Quá trình có loạt các điểm trên biểu đồ vi
phạm một hoặc nhiều nguyên tắc phép kiểm nghiệm được coi là mất kiểm soát và
nguyên nhân độ biến động ấn định của nó phải được xác định và khắc phục. Những
nguyên tắc thử bổ sung này cải thiện khả năng của biểu đồ kiểm soát để phát hiện
độ trôi nhỏ hơn về trung bình quá trình, nhưng với trả giá bằng tỷ lệ báo động sai
cao hơn. Biểu đồ Shewhart ![]() hoặc X với các phép
kiểm nghiệm dạng từ một đến ba được áp dụng đồng thời có tỷ lệ báo động sai
khoảng 10 phần nghìn, ngược với khoảng 3 phần nghìn khi chỉ áp dụng phép kiểm
nghiệm đầu tiên.
hoặc X với các phép
kiểm nghiệm dạng từ một đến ba được áp dụng đồng thời có tỷ lệ báo động sai
khoảng 10 phần nghìn, ngược với khoảng 3 phần nghìn khi chỉ áp dụng phép kiểm
nghiệm đầu tiên.
9. Kiểm soát quá trình, năng lực quá trình và cải tiến quá trình
Chức năng của hệ thống kiểm soát quá trình là cung cấp các tín hiệu thống kê tách biệt nguyên nhân biến động không ấn định được với nguyên nhân biến động ấn định được và chỉ để lại biến động không ấn định được. Việc loại bỏ có hệ thống các nguyên nhân ấn định được của độ biến động quá mức thông qua nỗ lực liên tục loại bỏ các nguyên nhân sẽ đưa quá trình vào trạng thái kiểm soát thống kê. Khi quá trình đang hoạt động trong trạng thái kiểm soát thống kê, có thể dự đoán được hiệu năng của nó và có thể đánh giá năng lực đáp ứng các quy định. Vì dự đoán là điều quan trọng trong quản lý nên khả năng biết những triển vọng là vô giá theo nghĩa quá trình hoạt động nhất quán hơn, dễ dự đoán và tin cậy hơn.
Năng lực quá trình được xác định bởi độ biến động
toàn phần sinh ra từ các nguyên nhân thông thường, độ biến động tối thiểu có
thể đạt được sau khi loại bỏ tất cả các nguyên nhân ấn định được. Năng lực quá trình
thể hiện hiệu năng của chính quá trình đó, như chứng tỏ khi quá trình hoạt động
trong trạng thái kiểm soát thống kê [xem bộ TCVN 9944 (ISO 22514)]. Như vậy, trước
hết phải đưa quá trình vào trạng thái kiểm soát thống kê trước khi có thể đánh giá
năng lực của nó. Do đó, đánh giá năng lực quá trình bắt đầu sau khi đã giải
quyết các vấn đề kiểm soát trong biểu đồ ![]() và
biểu đồ R; nghĩa là các nguyên nhân đặc biệt được nhận biết, phân tích,
thu thập và phòng ngừa việc tái diễn và biểu đồ kiểm soát hiện đang phản ánh quá
trình được duy trì trong kiểm soát thống kê, đối với ít nhất 25 nhóm con. Nhìn
chung, phân bố kết quả quá trình được so sánh với quy định kỹ thuật để xem các quy
định này có được đáp ứng nhất quán hay không.
và
biểu đồ R; nghĩa là các nguyên nhân đặc biệt được nhận biết, phân tích,
thu thập và phòng ngừa việc tái diễn và biểu đồ kiểm soát hiện đang phản ánh quá
trình được duy trì trong kiểm soát thống kê, đối với ít nhất 25 nhóm con. Nhìn
chung, phân bố kết quả quá trình được so sánh với quy định kỹ thuật để xem các quy
định này có được đáp ứng nhất quán hay không.
Năng lực quá trình thường được đo theo chỉ số năng lực quá trình Cp và Cpk. Xem bộ TCVN 9944 (ISO 22514). Giá trị Cp nhỏ hơn 1 cho biết quá trình không có khả năng, trong khi Cp = 1 ngụ ý rằng quá trình chỉ vừa đủ khả năng. Trong thực tế, thường lấy giá trị Cp là 1,33 như giá trị chấp nhận nhỏ nhất vì luôn có độ biến động khi lấy mẫu nhất định và một vài quá trình đã luôn duy trì ở trạng thái kiểm soát thống kê.
Tuy nhiên, cần lưu ý rằng Cp chỉ đo mối quan hệ của các giới hạn với độ trải quá trình; không xét vị trí hoặc định tâm quá trình. Có thể có một tỷ lệ phần trăm giá trị nằm ngoài giới hạn quy định với giá trị Cp cao. Vì lý do này, điều quan trọng là xét khoảng cách đã chỉnh thang đo giữa trung bình quá trình và giới hạn quy định gần nhất.
Theo thảo luận trên, quy trình, như được thể hiện bằng biểu đồ trong Hình 4, có thể sử dụng làm hướng dẫn để minh họa cho các bước chính dẫn đến kiểm soát, năng lực và cải tiến quá trình. Yêu cầu tối thiểu về năng lực quy định là kết quả sự thỏa thuận giữa nhà cung cấp và khách hàng.
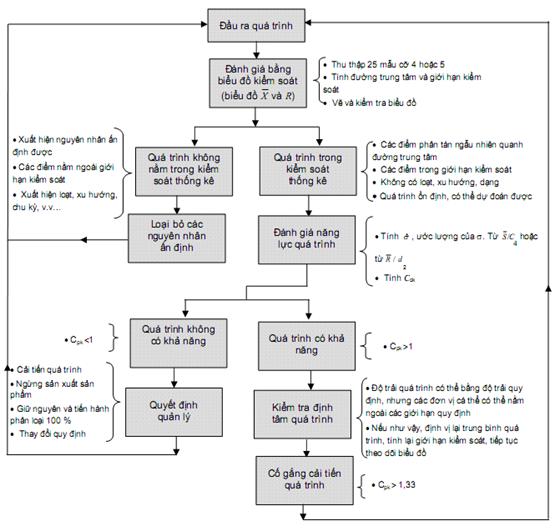
Hình 4 - Chiến lược cải tiến quá trình
CHÚ THÍCH: Cỡ mẫu tối ưu là hàm số của các thành phần độ biến động trong và giữa các mẫu.
10. Biểu đồ kiểm soát định tính
Dữ liệu định tính thể hiện các quan trắc thu được bằng cách ghi lại sự có hay không có một đặc trưng (hoặc thuộc tính) nào đó trong mỗi đơn vị trong nhóm con đang xét, sau đó đếm xem có bao nhiêu đơn vị có hoặc không có thuộc tính đó, hoặc có bao nhiêu biến cố xảy ra trong đơn vị, nhóm hoặc khu vực. Dữ liệu định tính thường thu được nhanh chóng, không tốn kém và thường không đòi hỏi kỹ năng thu thập đặc biệt. Bảng 5 đưa ra công thức giới hạn kiểm soát cho biểu đồ kiểm soát định tính.
Có nhiều sự quan tâm tập trung vào việc sử dụng dữ liệu định lượng cho cải tiến quá trình, nhưng dữ liệu phản hồi từ các ngành công nghiệp lớn cho thấy trên 80 % vấn đề về chất lượng có tính chất định tính. Do đó, cần nhấn mạnh hơn đến cải tiến đặc trưng định tính bằng cách sử dụng các biểu đồ kiểm soát.
Trong trường hợp biểu đồ kiểm soát định lượng, thực tế phổ biến là duy trì một cặp biểu đồ kiểm soát
- một để kiểm soát trung bình và một để kiểm soát sự phân tán. Điều này là cần thiết vì phân bố cơ sở trong biểu đồ kiểm soát định lượng là phân bố chuẩn, phụ thuộc vào hai tham số này. Tuy nhiên, trong trường hợp biểu đồ kiểm soát định tính, chỉ cần một biểu đồ là đủ vì phân bố giả định chỉ có một tham số độc lập là mức trung bình. Biểu đồ p và np dựa trên phân bố nhị thức, trong khi biểu đồ c và u dựa trên phân bố Poisson.
Các tính toán đối với những biểu đồ này tương tự nhau ngoại trừ trường hợp độ biến động trong cỡ nhóm con ảnh hưởng đến tình huống. Khi cỡ nhóm con không đổi, có thể dùng cùng một bộ giới hạn kiểm soát cho từng nhóm con. Tuy nhiên, nếu số lượng cá thể được kiểm tra trong mỗi nhóm con thay đổi, các giới hạn kiểm soát riêng rẽ phải được tính cho từng nhóm con. Như vậy biểu đồ np và biểu đồ c có thể được dùng hợp lý với cỡ mẫu không đổi, trong khi biểu đồ p và u có thể dùng trong cả hai trường hợp.
Khi cỡ mẫu thay đổi giữa các mẫu, các giới hạn kiểm soát riêng rẽ được tính cho mỗi mẫu. Cỡ nhóm con càng nhỏ thì dải kiểm soát càng rộng và ngược lại. Nếu cỡ nhóm con không thay đổi nhiều, thì có thể sử dụng bộ giới hạn kiểm soát đơn dựa trên cỡ nhóm con trung bình. Trong thực tiễn, điều này vẫn đúng trong trường hợp cỡ nhóm con nằm trong khoảng 25 % cỡ nhóm con mục tiêu.
CHÚ THÍCH: Cách khác là có thể sử dụng các giới hạn kiểm soát cho cỡ mẫu nhỏ nhất và lớn nhất. Đối với các điểm nằm ở giữa, chỉ tính các giới hạn kiểm soát.
Bảng 5 - Công thức giới hạn kiểm soát đối với biểu đồ kiểm soát định tính Shewhart
|
Thống kê |
Giá trị chuẩn không cho trước |
Giá trị chuẩn đã cho |
||
|
Đường trung tâm |
3s - giới hạn kiểm soát |
Đường trung tâm |
3s - giới hạn kiểm |
|
|
p |
|
|
p0 |
|
|
np |
|
|
np0 |
|
|
c |
|
|
c0 |
|
|
u |
|
|
u0 |
|
|
CHÚ THÍCH 1: p0, np0, c0 và u0 là các giá trị chuẩn đã cho CHÚ THÍCH 2: Sử dụng giới hạn kiểm soát dưới bằng 0 khi giới hạn được tính là giá trị âm. |
||||
Một quy trình thay thế cho các tình huống cỡ mẫu thay đổi nhiều là sử dụng biến chuẩn hóa. Ví dụ, thay vì vẽ đồ thị p thì vẽ đồ thị giá trị chuẩn hóa
![]()
Hoặc
![]()
tùy theo giá trị chuẩn đối với p có được quy định hay không. Đường trung tâm cũng như các giới hạn kiểm soát trở thành không đổi, độc lập về cỡ nhóm con, và được cho là
đường trung tâm = 0
UCL = +3
LCL = - 3
Sử dụng biểu đồ p để xác định trung
bình phần trăm cá thể không phù hợp giao nộp trong một khoảng thời gian. Biểu
đồ cho phép các nhân viên và quản lý quá trình lưu ý mọi thay đổi về trung bình
này. Quá trình được đánh giá là trong kiểm soát thống kê theo cách tương tự như
đối với biểu đồ![]() và biểu đồ R. Nếu tất
cả các điểm mẫu nằm trong các giới hạn kiểm soát thử mà không thấy có bất kỳ
nguyên nhân ấn định được nào thì quá trình được cho là được kiểm soát. Trong trường
hợp đó, tỷ lệ không phù hợp trung bình,
và biểu đồ R. Nếu tất
cả các điểm mẫu nằm trong các giới hạn kiểm soát thử mà không thấy có bất kỳ
nguyên nhân ấn định được nào thì quá trình được cho là được kiểm soát. Trong trường
hợp đó, tỷ lệ không phù hợp trung bình, ![]() ,
được lấy làm giá trị chuẩn cho tỷ lệ không phù hợp, p0.
,
được lấy làm giá trị chuẩn cho tỷ lệ không phù hợp, p0.
Kết quả thấp trên biểu đồ kiểm soát (các điểm nằm dưới giới hạn kiểm soát dưới) cần được xử lý khác với các điểm đồ thị cao. Chúng cho thấy sự thay đổi trong quá trình nhờ loại bỏ nguyên nhân thông thường, nhưng có một điều cảnh báo là nó cũng có thể chỉ ra các chuẩn kiểm tra thấp hơn. Khi giới hạn LCL bị vượt quá đáng kể, điều quan trọng là hiểu được các nguyên nhân và thể chế hóa thay đổi trong tiêu chuẩn công việc.
11. Xem xét sơ bộ trước khi bắt đầu biểu đồ kiểm soát
11.1. Lựa chọn đặc trưng quan trọng đối với chất lượng (CTQ) mô tả quá trình kiểm soát
Các đặc trưng ảnh hưởng nghiêm trọng đến hiệu năng của sản phẩm, quá trình, hoặc dịch vụ và gia tăng giá trị cho khách hàng cần được phân loại ở giai đoạn hoạch định chất lượng. Khi độ biến động là yếu tố quan trọng của quá trình, các đặc trưng này cần được chọn để có ảnh hưởng quyết định đến chất lượng sản phẩm hoặc dịch vụ và để đảm bảo tính ổn định và khả năng dự đoán của quá trình. Đây có thể là các khía cạnh liên quan trực tiếp đến việc đánh giá hiệu năng của quá trình - ví dụ, liên quan đến môi trường, sức khỏe, sự thỏa mãn của khách hàng - hoặc tham số quá trình mà hiệu năng của chúng quan trọng trong việc đạt được mục đích thiết kế. Cần đưa biểu đồ kiểm soát vào từ giai đoạn đầu xây dựng quá trình để thu thập dữ liệu và thông tin về sản phẩm mới và tính khả thi của quá trình để đạt được năng lực quá trình trước khi sản xuất. Điều này cho phép tối ưu hóa quá trình và mọi thiết kế hoặc cải tiến quá trình để tạo ra sản phẩm hoặc dịch vụ tốt hơn.
11.2. Phân tích quá trình
Nếu có thể, cần tiến hành phân tích chi tiết quá trình để xác định:
a) loại và vị trí của nguyên nhân có thể gây nên những điều bất thường;
b) tác động của việc đặt ra các quy định;
c) phương pháp và vị trí kiểm tra;
d) tất cả các yếu tố thích hợp khác có thể ảnh hưởng đến quá trình sản xuất.
Cũng cần thực hiện phân tích để xác định tính ổn định của quá trình, độ chính xác của thiết bị thử, chất lượng đầu ra của quá trình cũng như các dạng tương quan giữa các loại và nguyên nhân của sự không phù hợp. Điều kiện hoạt động cần có các bố trí để điều chỉnh quá trình sản xuất và thiết bị, nếu cần, cũng như đưa ra các kế hoạch cho kiểm soát thống kê quá trình. Điều này sẽ giúp xác định chính xác nơi tối ưu nhất để thiết lập kiểm soát và nhận biết nhanh mọi bất thường về hiệu năng quá trình để có hành động khắc phục kịp thời.
11.3. Lựa chọn nhóm con hợp lý
Ý tưởng chính của Shewhart làm cơ sở cho các biểu đồ kiểm soát là phân chia các quan trắc thành các nhóm con được gọi là “nhóm con hợp lý”; đó là việc phân lớp các quan trắc thành các nhóm con, trong đó mọi biến động có thể được coi là chỉ do nguyên nhân ngẫu nhiên, nhưng bất cứ sự khác nhau nào giữa chúng có thể do nguyên nhân ấn định được mà biểu đồ kiểm soát dự kiến sẽ phát hiện.
Điều này phụ thuộc vào kiến thức kỹ thuật và sự quen thuộc với các điều kiện quá trình và các điều kiện lấy dữ liệu. Nhờ việc nhận biết từng nhóm con theo thời gian hoặc nguồn, nếu thuận lợi, có thể xác định và xử lý dễ dàng nguyên nhân cụ thể của vấn đề. Hồ sơ kiểm tra và kiểm nghiệm được đưa ra theo thứ tự thực hiện các quan trắc để cung cấp cơ sở cho việc lập nhóm con theo thời gian. Điều này thường hữu ích trong sản xuất khi việc duy trì hệ thống nguyên nhân sản xuất ổn định theo thời gian là điều quan trọng.
Trong thu thập dữ liệu, phân tích sẽ thuận lợi hơn nhiều nếu lựa chọn thận trọng các mẫu có thể được xử lý thích hợp như các nhóm con hợp lý riêng rẽ. Nếu có thể, cần giữ nguyên cỡ nhóm con để tạo thuận lợi cho việc tính và giải thích. Tuy nhiên, cần lưu ý rằng các nguyên tắc của biểu đồ Shewhart cũng có thể được áp dụng trong trường hợp cỡ nhóm con thay đổi.
11.4. Tần số và cỡ nhóm con
Không có quy tắc chung nào được đặt ra đối với tần số lấy nhóm con hoặc cỡ nhóm con. Tần số và cỡ nhóm con có thể phụ thuộc vào chi phí lấy và phân tích mẫu cùng những xem xét thực tiễn. Ví dụ, nhóm con lớn được lấy ở những khoảng ít thường xuyên hơn có thể phát hiện chính xác hơn độ trôi nhỏ về trung bình quá trình, nhưng các nhóm con nhỏ lấy ở các khoảng thường xuyên hơn sẽ phát hiện độ trôi lớn nhanh hơn. Thông thường, cỡ nhóm con được lấy là 4 hoặc 5, trong khi tần số lấy mẫu lúc bắt đầu thường cao và thấp khi đã đạt trạng thái kiểm soát thống kê. Thông thường, 25 nhóm con với cỡ 4 hoặc 5 được coi là đủ để đưa ra các ước lượng ban đầu.
Điều đáng lưu ý là tần số lấy mẫu, kiểm soát thống
kê và năng lực quá trình cần được xem xét cùng nhau. Lý do là giá trị của độ rộng
trung bình![]() thường được dùng để ước lượng s. Số nguồn biến động tăng khi khoảng
thời gian giữa các mẫu trong nhóm con tăng. Vì thế, việc lấy mẫu nhóm con trong
thời gian dài sẽ làm tăng
thường được dùng để ước lượng s. Số nguồn biến động tăng khi khoảng
thời gian giữa các mẫu trong nhóm con tăng. Vì thế, việc lấy mẫu nhóm con trong
thời gian dài sẽ làm tăng![]() , tăng ước lượng
của s, mở rộng các giới
hạn kiểm soát và do đó sẽ giảm chỉ số năng lực quá trình. Ngược lại, có thể tăng
năng lực quá trình nhờ lấy mẫu nhỏ liên tiếp, cho ước lượng
, tăng ước lượng
của s, mở rộng các giới
hạn kiểm soát và do đó sẽ giảm chỉ số năng lực quá trình. Ngược lại, có thể tăng
năng lực quá trình nhờ lấy mẫu nhỏ liên tiếp, cho ước lượng ![]() và s nhỏ.
và s nhỏ.
11.5. Thu thập dữ liệu ban đầu
Sau khi quyết định chọn đặc trưng chất lượng cần kiểm soát, tần số và cỡ nhóm con cần lấy, phải thu thập và phân tích một số dữ liệu kiểm tra ban đầu hoặc phép đo cho mục đích cung cấp giá trị biểu đồ kiểm soát ban đầu cần thiết để xác định đường trung tâm và giới hạn kiểm soát được vẽ trên biểu đồ. Dữ liệu ban đầu có thể được thu thập theo từng nhóm con đến khi nhận được 25 nhóm con từ loạt quá trình sản xuất liên tục. Phải chú ý là trong quá trình thu thập dữ liệu ban đầu này, quá trình không bị ảnh hưởng quá mức bởi các yếu tố ngoại lai như sự thay đổi nguồn nguyên liệu thô, người vận hành, hoạt động, cách bố trí máy móc, v.v... Nói cách khác, quá trình cần thể hiện trạng thái ổn định trong suốt thời gian thu thập dữ liệu ban đầu.
11.6. Kế hoạch hành động đối với tình trạng mất kiểm soát
Có một mối liên hệ quan trọng giữa hai loại biến động và loại hành động cần thiết để giảm biến động. Biểu đồ kiểm soát có thể phát hiện nguyên nhân biến động đặc biệt. Phát hiện nguồn nguyên nhân đặc biệt và thực hiện hành động khắc phục thường là trách nhiệm của các người vận hành, người giám sát hoặc các kỹ sư liên quan trực tiếp với quá trình. Người quản lý chịu trách nhiệm đối với hơn 80 % nguyên nhân và phải thực hiện hành động đối với nguyên nhân thông thường trong hệ thống. Nguyên nhân đặc biệt được nhận biết cục bộ và có thể do người sở hữu quá trình hành động. Quá trình thường được điều chỉnh như hành động khắc phục khi cần có hành động quản lý trên hệ thống đối với nguyên nhân gốc rễ do các nguồn khác nhau về nguyên liệu thô, bảo trì máy, hiệu chỉnh hoặc phương pháp không tin cậy. Làm việc nhóm chặt chẽ là chìa khóa để cải tiến liên tục trong dài hạn.
Khi quá trình vốn không có khả năng hoặc có khả năng nhưng nằm ngoài kiểm soát thống kê và tạo ra sản phẩm không phù hợp, thì kiểm tra 100 % thường được tiến hành đến khi quá trình được điều chỉnh.
Cần phải đảm bảo tính nhất quán của việc kiểm tra. Độ không đảm bảo đo cần được duy trì ở các giới hạn dung sai hữu ích.
12. Các bước xây dựng biểu đồ kiểm soát
Các bước xây dựng biểu đồ ![]() và biểu đồ R, đối với trường
hợp không cho trước giá trị chuẩn, được mô tả trong 12.1 đến 12.3. Chúng được
mô tả dưới dạng ví dụ trong Phụ lục A. Khi xây dựng các biểu đồ kiểm soát khác phải
tuân theo các bước cơ bản tương tự nhưng có khác biệt về phương pháp tính để xác
định các giới hạn kiểm soát và đường trung tâm. Dạng điển hình của biểu đồ kiểm
soát chuẩn được thể hiện trên Hình 5. Có thể sửa đổi hình thức này theo các yêu
cầu cụ thể của trạng thái kiểm soát quá trình.
và biểu đồ R, đối với trường
hợp không cho trước giá trị chuẩn, được mô tả trong 12.1 đến 12.3. Chúng được
mô tả dưới dạng ví dụ trong Phụ lục A. Khi xây dựng các biểu đồ kiểm soát khác phải
tuân theo các bước cơ bản tương tự nhưng có khác biệt về phương pháp tính để xác
định các giới hạn kiểm soát và đường trung tâm. Dạng điển hình của biểu đồ kiểm
soát chuẩn được thể hiện trên Hình 5. Có thể sửa đổi hình thức này theo các yêu
cầu cụ thể của trạng thái kiểm soát quá trình.
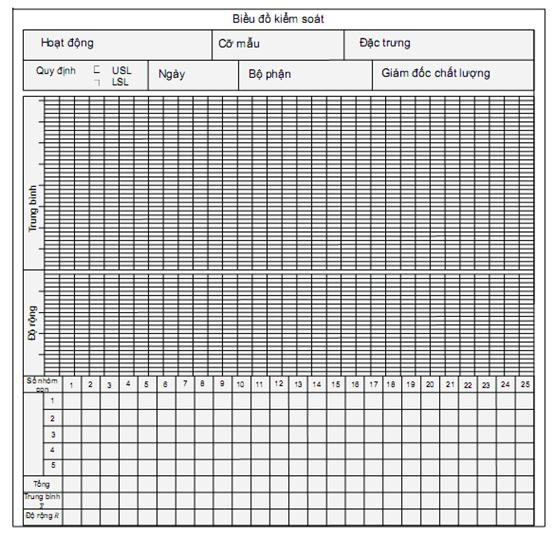
Hình 5 - Dạng tổng quát của biểu đồ kiểm soát định lượng
12.1. Xác định chiến lược thu thập dữ liệu
Nếu dữ liệu ban đầu không được lấy thành nhóm con theo kế hoạch đã định thì chia toàn bộ các giá trị quan trắc thành các nhóm con liên tiếp, theo chuẩn mực đối với nhóm con hợp lý như thảo luận trong 11.3. Các nhóm con phải cùng cấu trúc và cùng cỡ. Các cá thể của bất kỳ một nhóm con nào cần có một yếu tố chung quan trọng, ví dụ các đơn vị được sản xuất trong cùng khoảng thời gian ngắn hoặc các đơn vị đến từ một trong các nguồn hoặc địa điểm rõ ràng. Các nhóm con khác nhau cần biểu thị sự khác nhau có thể hoặc nghi ngờ trong quá trình sản xuất chúng, ví dụ khoảng thời gian khác nhau hoặc nguồn hay địa điểm khác nhau.
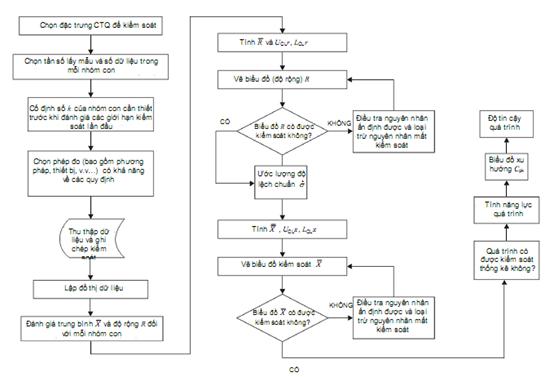
Hình 6 - Cách tiếp cận hệ thống để xây dựng biểu đồ kiểm soát định lượng
CHÚ THÍCH: Lập danh mục nguồn biến động ngẫu nhiên đã biết và nguyên nhân ấn định được.
12.2. Thu thập và tính dữ liệu
Đối với mỗi nhóm con, tính trung bình ![]() và độ rộng R. Sau đó tính trung
bình chung của tất cả các giá trị quan trắc,
và độ rộng R. Sau đó tính trung
bình chung của tất cả các giá trị quan trắc, ![]() ,
và độ rộng trung bình
,
và độ rộng trung bình ![]() .
.
12.3. Vẽ biểu đồ ![]() và biểu đồ R
và biểu đồ R
Trên mẫu hay trên giấy vẽ đồ thị thích hợp, trình
bày biểu đồ ![]() và biểu đồ R. Tung độ bên trái
được sử dụng cho
và biểu đồ R. Tung độ bên trái
được sử dụng cho ![]() và R còn hoành độ
được dùng cho số nhóm con. Vẽ giá trị tính được cho
và R còn hoành độ
được dùng cho số nhóm con. Vẽ giá trị tính được cho ![]() trên
biểu đồ trung bình và vẽ giá trị tính được cho R trên biểu đồ độ rộng.
trên
biểu đồ trung bình và vẽ giá trị tính được cho R trên biểu đồ độ rộng.
Trên các biểu đồ tương ứng này, vẽ đường nằm ngang
liền nét để thể hiện ![]() và R.
và R.
Đặt các giới hạn kiểm soát trên các biểu đồ
này. Trên biểu đồ ![]() , vẽ hai đường nằm ngang đứt
nét tại
, vẽ hai đường nằm ngang đứt
nét tại ![]() còn trên biểu đồ R, vẽ hai
đường nằm ngang đứt nét tại D3
còn trên biểu đồ R, vẽ hai
đường nằm ngang đứt nét tại D3![]() và D4
và D4![]() , trong đó A2,
D3 và D4 dựa trên số quan trắc trong nhóm con,
n, và được cho trong Bảng 2. Không cần thể hiện LCL
trên biểu đồ R khi n nhỏ hơn 7 vì giá trị kế tiếp của D3
được coi là bằng "không".
, trong đó A2,
D3 và D4 dựa trên số quan trắc trong nhóm con,
n, và được cho trong Bảng 2. Không cần thể hiện LCL
trên biểu đồ R khi n nhỏ hơn 7 vì giá trị kế tiếp của D3
được coi là bằng "không".
13. Cảnh báo đối với biểu đồ kiểm soát Shewhart
Có một số tình huống thực tế, như được nêu dưới đây, trong đó một số cảnh báo có thể cần thiết cho việc sử dụng biểu đồ kiểm soát Shewhart.
13.1. Cảnh báo chung
Độ biến động trong nhóm con không nhất thiết chỉ do nguyên nhân ngẫu nhiên. Nhóm con bao gồm lô xử lý; nghĩa là độ biến động trong nhóm con là độ biến động trong lô. Nhóm con được xét theo quan điểm về cả khía cạnh vật lý và đảm bảo chất lượng. Do đó, cần phải kiểm soát độ biến động trong lô xử lý bằng cách sử dụng biểu đồ R.
Hình 7 thể hiện biểu đồ kiểm soát ![]() và R trong giai đoạn đầu sản
xuất hàng loạt của quá trình xử lý nhiệt. Đây là biểu đồ kiểm soát
và R trong giai đoạn đầu sản
xuất hàng loạt của quá trình xử lý nhiệt. Đây là biểu đồ kiểm soát ![]() và R trong đó không giá
trị chuẩn nào cho trước. Biểu đồ R cho biết quá trình trong trạng thái kiểm
soát, nhưng biểu đồ
và R trong đó không giá
trị chuẩn nào cho trước. Biểu đồ R cho biết quá trình trong trạng thái kiểm
soát, nhưng biểu đồ ![]() cho thấy
nhiều điểm và trạng thái mất kiểm soát.
cho thấy
nhiều điểm và trạng thái mất kiểm soát.
Hình 7 - Biểu đồ ![]() và R thông
thường trong sản xuất hàng loạt giai đoạn đầu
và R thông
thường trong sản xuất hàng loạt giai đoạn đầu
Ngoài ra, Hình 8 thể hiện biểu đồ ![]() và R khác với cùng dữ liệu
như trong Hình 7, trong đó các giới hạn kiểm soát của biểu đồ
và R khác với cùng dữ liệu
như trong Hình 7, trong đó các giới hạn kiểm soát của biểu đồ ![]() được tính trên cơ sở độ biến động
quá trình tổng thể thay cho trung bình độ rộng
được tính trên cơ sở độ biến động
quá trình tổng thể thay cho trung bình độ rộng ![]() .
.
Hình 8 cho biết quá trình trong trạng thái
kiểm soát. Khi đó nếu hiệu năng quá trình thỏa mãn, có thể quyết định đưa quá trình
đến giai đoạn sản xuất hàng loạt thông thường từ sản xuất hàng loạt giai đoạn đầu.
Các giới hạn kiểm soát của biểu đồ ![]() và
R trên Hình 8 được sử dụng làm mức kiểm soát chuẩn trong sản xuất hàng loạt
thông thường. Điều này có nghĩa là độ biến động ngẫu nhiên do một số nguyên
nhân cho phép giữa các nhóm con trong sản xuất hàng loạt giai đoạn đầu được
tính đến là độ biến động do nguyên nhân ngẫu nhiên.
và
R trên Hình 8 được sử dụng làm mức kiểm soát chuẩn trong sản xuất hàng loạt
thông thường. Điều này có nghĩa là độ biến động ngẫu nhiên do một số nguyên
nhân cho phép giữa các nhóm con trong sản xuất hàng loạt giai đoạn đầu được
tính đến là độ biến động do nguyên nhân ngẫu nhiên.
Do đó, cần lưu ý rằng độ biến động trong nhóm
con không nhất thiết nghĩa là chỉ do nguyên nhân ngẫu nhiên. Tuy nhiên, các điểm
17 đến 24 trên biểu đồ ![]() nằm cao hơn đường
trung tâm và xu hướng tăng lên từ điểm 9 đến điểm 24, cùng với phân nhóm các điểm
quanh
nằm cao hơn đường
trung tâm và xu hướng tăng lên từ điểm 9 đến điểm 24, cùng với phân nhóm các điểm
quanh ![]() trên biểu đồ độ rộng, cho biết tiềm năng
của việc cải tiến thông qua việc phát hiện và loại trừ các nguyên nhân ấn định
được.
trên biểu đồ độ rộng, cho biết tiềm năng
của việc cải tiến thông qua việc phát hiện và loại trừ các nguyên nhân ấn định
được.
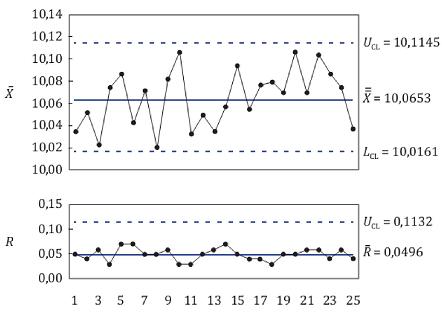
Hình 8 - Biểu đồ ![]() và R, khi đường kiểm soát
của biểu đồ
và R, khi đường kiểm soát
của biểu đồ ![]() được cho từ độ biến
động quá trình tổng thể thay cho trung bình độ rộng
được cho từ độ biến
động quá trình tổng thể thay cho trung bình độ rộng ![]()
13.2. Dữ liệu tương quan
Khi dữ liệu có sự tương quan, phương trình
sau đây, là phương trình cơ bản cho việc xây dựng biểu đồ ![]() với cỡ mẫu n, không đúng:
với cỡ mẫu n, không đúng:
Vì vậy, nếu các giới hạn kiểm soát được tính theo quy trình thông thường thì sẽ là áp dụng sai.
Trong trường hợp đó, cần xác định mô hình quá
trình và số dư của mô hình được coi là các quan trắc. Cách khác là cần tính các
giới hạn kiểm soát từ độ biến động của ![]() .
Cần tham khảo ý kiến của chuyên gia.
.
Cần tham khảo ý kiến của chuyên gia.
13.3. Sử dụng nguyên tắc thay thế nguyên tắc 3 sigma
Biểu đồ Shewhart kiểm soát trung bình sẽ phát
hiện nhanh chóng độ trôi ổn định lớn trong mức trung bình quá trình. Tuy nhiên,
nếu độ trôi ở mức trung bình nhỏ, bằng 1,5 độ lệch chuẩn hoặc nhỏ hơn thì biểu đồ
Shewhart kiểm soát ![]() không thể hiện
tốt điều này. Do đó, trong trường hợp như vậy, nếu độ trôi trung bình quá trình
nhỏ so với mức mong muốn phải được phát hiện sớm nhất có thể, thì kiểm nghiệm dạng
bổ sung thường được sử dụng. Tuy nhiên, các nguyên tắc bổ sung đó có thể làm
tăng tỷ lệ báo động sai, có nghĩa là khả năng quan sát tín hiệu trên biểu đồ thông
qua việc áp dụng các nguyên tắc này tăng đáng kể. Mặt khác, khi biểu đồ kiểm
soát không sử dụng giá trị chuẩn nào trong sản xuất hàng loạt giai đoạn đầu, thì
cần xem xét các nguyên tắc bổ sung cho ở Điều 8 trong việc cải tiến hiệu năng quá
trình. Chiến lược khác là sử dụng các biểu đồ kiểm soát, ví dụ như biểu đồ
trung bình trượt có trọng số mũ (EWMA) hoặc biểu đồ Cusum.
không thể hiện
tốt điều này. Do đó, trong trường hợp như vậy, nếu độ trôi trung bình quá trình
nhỏ so với mức mong muốn phải được phát hiện sớm nhất có thể, thì kiểm nghiệm dạng
bổ sung thường được sử dụng. Tuy nhiên, các nguyên tắc bổ sung đó có thể làm
tăng tỷ lệ báo động sai, có nghĩa là khả năng quan sát tín hiệu trên biểu đồ thông
qua việc áp dụng các nguyên tắc này tăng đáng kể. Mặt khác, khi biểu đồ kiểm
soát không sử dụng giá trị chuẩn nào trong sản xuất hàng loạt giai đoạn đầu, thì
cần xem xét các nguyên tắc bổ sung cho ở Điều 8 trong việc cải tiến hiệu năng quá
trình. Chiến lược khác là sử dụng các biểu đồ kiểm soát, ví dụ như biểu đồ
trung bình trượt có trọng số mũ (EWMA) hoặc biểu đồ Cusum.
![]() Một nguyên tắc khác là
thay thế chuẩn mực tín hiệu mất kiểm soát thông thường cũng như vị trí của các giới
hạn kiểm soát trên biểu đồ. Tín hiệu được cho trên biểu đồ
Một nguyên tắc khác là
thay thế chuẩn mực tín hiệu mất kiểm soát thông thường cũng như vị trí của các giới
hạn kiểm soát trên biểu đồ. Tín hiệu được cho trên biểu đồ ![]() nếu hai trong ba điểm nằm ngoài giới
hạn 2s. Khi sử dụng chuẩn
mực “hai trong ba” này giới hạn kiểm soát 3 sigma thông thường trên biểu đồ
nếu hai trong ba điểm nằm ngoài giới
hạn 2s. Khi sử dụng chuẩn
mực “hai trong ba” này giới hạn kiểm soát 3 sigma thông thường trên biểu đồ ![]() được thay bằng đường giới hạn kiểm
soát đặt ở 1,78 sigma về mỗi phía của đường trung tâm. Sử dụng nguyên tắc này và
các giới hạn kiểm soát này sẽ tạo ra biểu đồ với tỷ lệ báo động sai tương đương
với biểu đồ kiểm soát Shewhart thông thường có quy tắc một điểm ngoài giới hạn kiểm
soát 3 sigma.
được thay bằng đường giới hạn kiểm
soát đặt ở 1,78 sigma về mỗi phía của đường trung tâm. Sử dụng nguyên tắc này và
các giới hạn kiểm soát này sẽ tạo ra biểu đồ với tỷ lệ báo động sai tương đương
với biểu đồ kiểm soát Shewhart thông thường có quy tắc một điểm ngoài giới hạn kiểm
soát 3 sigma.
Tuy nhiên, xác suất phát hiện độ trôi từ nhỏ đến trung bình tăng đáng kể khi sử dụng chuẩn mực sửa đổi này.
PHỤ LỤC A
(tham khảo)
Ví dụ minh họa
A.1. Biểu đồ kiểm soát định lượng
A.1.1. Biểu đồ ![]() và
biểu đồ R - với m
và s chưa biết
và
biểu đồ R - với m
và s chưa biết
A.1.2. Biểu đồ ![]() và
biểu đồ s - với m và s đã biết
và
biểu đồ s - với m và s đã biết
A.1.3. Biểu đồ kiểm soát cá thể và độ rộng trượt - với m và s chưa biết
A.1.4. Biểu đồ trung vị và biểu đồ R - với m và s chưa biết
A.2. Biểu đồ kiểm soát định tính
A.2.1. Biểu đồ p - không cho giá trị p0
A.2.2. Biểu đồ np - không cho giá trị p0
A.2.3. Biểu đồ c - không cho giá trị c0
A.2.4. Biểu đồ u - không cho giá trị u0
A.3. Biểu đồ kiểm soát định lượng
A.3.1. Biểu đồ ![]() và biểu đồ R -
với m và s chưa biết
và biểu đồ R -
với m và s chưa biết
Nhà cung cấp máy bơm nước muốn kiểm soát quá trình quay bằng cách sử dụng biểu đồ kiểm soát. Một đặc trưng quan trọng là đường kính ổ đỡ. Thực hiện phép đo từ sản xuất mới mỗi giờ với tổng số 25 mẫu. Giá trị tối đa và tối thiểu trong mẫu nhóm con được cho trong Bảng A.1.
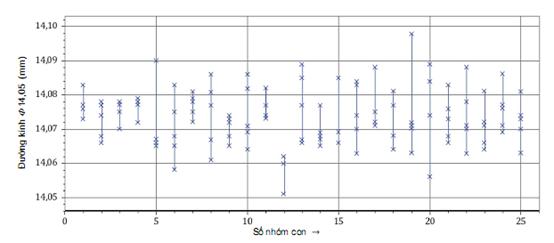
Hình A.1 - Giá trị được vẽ đồ thị
CHÚ THÍCH 1: Dữ liệu gồm 125 điểm dữ liệu từ 25 nhóm con có cỡ mẫu 5. 125 điểm dữ liệu được vẽ trên Hình A.1 và phép tính chuẩn các nhóm con được cho trong Bảng A.1.
CHÚ THÍCH 2: Biểu đồ cũng có thể được vẽ theo chiều dọc. Biểu đồ này cùng với đồ thị sẽ thể hiện biểu hiện của quá trình một cách rõ ràng. Xu hướng hướng tâm và các quan trắc khác thường trở nên rõ ràng hơn nếu không thì sẽ khó quan sát.
Bảng A.1 - Kết quả nhóm con từ phép đo đường kính ổ đỡ
|
j |
|
xmin j |
xmax j |
Rj |
|
1 |
14,076 4 |
14,073 |
14,083 |
0,010 |
|
2 |
14,072 6 |
14,066 |
14,078 |
0,012 |
|
3 |
14,075 4 |
14,070 |
14,078 |
0,008 |
|
4 |
14,077 0 |
14,072 |
14,079 |
0,007 |
|
5 |
14,070 8 |
14,065 |
14,090 |
0,025 |
|
6 |
14,069 8 |
14,058 |
14,083 |
0,025 |
|
7 |
14,077 0 |
14,072 |
14,081 |
0,009 |
|
8 |
14,074 4 |
14,061 |
14,086 |
0,025 |
|
9 |
14,070 4 |
14,065 |
14,074 |
0,009 |
|
10 |
14,074 4 |
14,064 |
14,086 |
0,022 |
|
11 |
14,076 6 |
14,073 |
14,082 |
0,009 |
|
12 |
14,056 8 |
14,051 |
14,062 |
0,011 |
|
13 |
14,076 8 |
14,066 |
14,089 |
0,023 |
|
14 |
14,069 2 |
14,065 |
14,077 |
0,012 |
|
15 |
14,071 6 |
14,066 |
14,085 |
0,019 |
|
16 |
14,074 8 |
14,063 |
14,084 |
0,021 |
|
17 |
14,075 4 |
14,071 |
14,088 |
0,017 |
|
18 |
14,073 4 |
14,064 |
14,081 |
0,017 |
|
19 |
14,074 8 |
14,063 |
14,098 |
0,035 |
|
20 |
14,075 4 |
14,056 |
14,089 |
0,033 |
|
21 |
14,073 2 |
14,066 |
14,083 |
0,017 |
|
22 |
14,074 0 |
14,063 |
14,088 |
0,025 |
|
23 |
14,070 8 |
14,064 |
14,081 |
0,017 |
|
24 |
14,076 0 |
14,069 |
14,086 |
0,017 |
|
25 |
14,072 2 |
14,063 |
14,081 |
0,018 |
Vì chưa biết m và s trong ví dụ này, ![]() và
và
![]() được tính dựa trên toàn bộ tập giá
trị.
được tính dựa trên toàn bộ tập giá
trị.
Trung bình ![]() và
độ rộng
và
độ rộng ![]() được tính cho mỗi nhóm con j
(xem Bảng A.1).
được tính cho mỗi nhóm con j
(xem Bảng A.1).
Dựa trên các tính toán này,
trong đó k là số nhóm con.
Bước đầu tiên là vẽ biểu đồ R và đánh giá trạng thái kiểm soát của nó.
Lấy giá trị D3 và D4 từ Bảng 2 trong đó n = 5
Biểu đồ R
Đường trung tâm CL = ![]() = 0,017 7 mm
= 0,017 7 mm
UCL = D4
x ![]() = 2,144 x 0,017 7 = 0,037 5 mm
= 2,144 x 0,017 7 = 0,037 5 mm
LCL = D3
x ![]() trong đó D3 = 0 khi
cỡ mẫu < 7
trong đó D3 = 0 khi
cỡ mẫu < 7
Biểu đồ R cho thấy quá trình trong trạng thái kiểm soát.
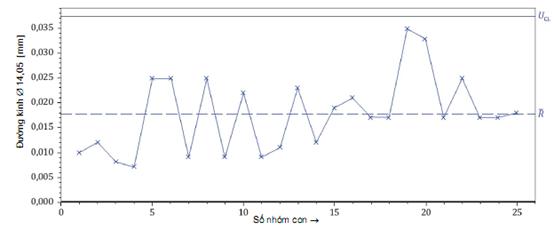
Hình A.2 - Biểu đồ R - đường kính ổ đỡ
Sau đó có thể tính biểu đồ ![]() dựa trên giá trị
dựa trên giá trị![]() và R
và R
Biểu đồ ![]() :
:
Đường trung tâm CL = ![]() = 14,073 17 mm
= 14,073 17 mm
UCL = ![]() + A2 x
+ A2 x ![]() = 14,073 17 + (0,577 x 0,017 72) =
14,083 41 mm ~ 14,083 4 mm
= 14,073 17 + (0,577 x 0,017 72) =
14,083 41 mm ~ 14,083 4 mm
LCL = ![]() - A2 x
- A2 x ![]() = 14,073 17 - (0,577 x 0,017 72) =
14,062 93 mm ~ 14,062 9 mm
= 14,073 17 - (0,577 x 0,017 72) =
14,062 93 mm ~ 14,062 9 mm
Giá trị của hệ số A2 được lấy từ Bảng 2 trong đó n = 5
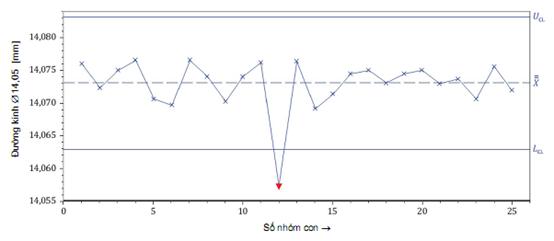
Hình A.3 - Biểu đồ ![]() - đường kính ổ đỡ
- đường kính ổ đỡ
Biểu đồ ![]() cho
thấy quá trình mất kiểm soát.
cho
thấy quá trình mất kiểm soát.
Kiểm tra biểu đồ ![]() cho
thấy nhóm con 12 mất kiểm soát. Nó cho biết một số nguyên nhân biến động ấn
định có thể diễn ra.
cho
thấy nhóm con 12 mất kiểm soát. Nó cho biết một số nguyên nhân biến động ấn
định có thể diễn ra.
Do đó, ta loại nhóm con 12 khỏi việc tính toán và tìm:
Biểu đồ ![]() được
sửa đổi
được
sửa đổi
Đường trung tâm CL = ![]() =
14,074 01 mm
=
14,074 01 mm
UCL = ![]() + A2
x
+ A2
x ![]() = 14,073 85 + (0,577 x 0,018 00) =
14,084 23 mm ~ 14,084 2 mm
= 14,073 85 + (0,577 x 0,018 00) =
14,084 23 mm ~ 14,084 2 mm
LCL = ![]() + A2
x
+ A2
x ![]() = 14,073 85 - (0,577 x 0,018 00) =
14,063 468 mm ~ 14,063 5 mm
= 14,073 85 - (0,577 x 0,018 00) =
14,063 468 mm ~ 14,063 5 mm
Biểu đồ R được sửa đổi:
Đường trung tâm CL = ![]() = 0,018 00 mm
= 0,018 00 mm
UCL = D4 x ![]() = 2,144 x 0,01800 = 0,038 05 mm ~
0,038 1 mm
= 2,144 x 0,01800 = 0,038 05 mm ~
0,038 1 mm
LCL = D3 x ![]() trong đó D3 = 0 khi
cỡ mẫu < 7
trong đó D3 = 0 khi
cỡ mẫu < 7
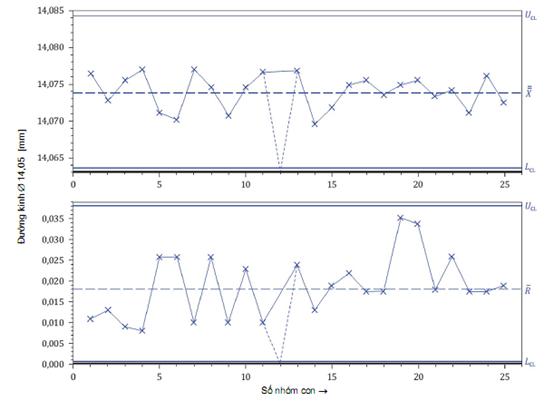
Hình A.4 - Biểu đồ![]() và biểu đồ R - đường kính ổ đỡ
và biểu đồ R - đường kính ổ đỡ
Sau khi xóa nhóm con 12, quá trình trong trạng thái kiểm soát và các giới hạn kiểm soát tính trước đó có thể được sử dụng để kiểm soát quá trình trong tương lai.
A.3.2 Biểu đồ ![]() và
biểu đồ s - với m và s được cho từ sản xuất trước đó
và
biểu đồ s - với m và s được cho từ sản xuất trước đó
Nhà sản xuất pin muốn kiểm soát khối lượng pin để khối lượng pin trung bình là 29,87 g. Phân tích quá trình từ sản xuất trước đây cho biết có thể giả định độ lệch chuẩn quá trình là 0,062 g.
Khi giá trị chuẩn là m0 = 29,87 g và s0 = 0,062 g, có thể lập ngay biểu đồ kiểm soát bằng cách sử dụng công thức cho trong Bảng 1 và các hệ số A, C4, D2, và D1 cho trong Bảng 2 bằng cách sử dụng cỡ nhóm con là 5.
Đường trung tâm CL = m0 = 29,87 mm
UCL = m0 + As0 = 29,87 + (1,342 x 0,062) = 29,953 2 mm » 29,953 mm
LCL = m0 + As0 = 29,87 - (1,342 x 0,062) = 29,786 8 mm » 29,787 mm
Đường trung tâm = C4s0 = 0,94 x 0,062 = 0,058 28 mm » 0,058 3 mm
UCL = B6s0 = 1,964 x 0,062 = 0,121 768 mm » 0,121 8 mm
LCL = B5s0 trong đó B5= 0 khi cỡ mẫu < 6
25 mẫu cỡ 5 được lựa chọn từ quá trình sản xuất, trung bình nhóm con của chúng và độ lệch chuẩn được tính, như được cho trong Bảng A.2.
Bảng A.2 - Kết quả nhóm con từ sản xuất pin
|
J |
|
sj |
|
1 |
29,816 |
0,052 |
|
2 |
29,932 |
0,022 |
|
3 |
29,858 |
0,066 |
|
4 |
29,824 |
0,023 |
|
5 |
29,888 |
0,036 |
|
6 |
29,830 |
0,066 |
|
7 |
29,868 |
0,043 |
|
8 |
29,876 |
0,038 |
|
9 |
29,910 |
0,064 |
|
10 |
29,802 |
0,049 |
|
11 |
29,884 |
0,019 |
|
12 |
29,880 |
0,019 |
|
13 |
29,816 |
0,031 |
|
14 |
29,898 |
0,040 |
|
15 |
29,946 |
0,058 |
|
16 |
29,842 |
0,045 |
|
17 |
29,824 |
0,063 |
|
18 |
29,904 |
0,056 |
|
19 |
29,912 |
0,056 |
|
20 |
29,886 |
0,048 |
|
21 |
29,908 |
0,073 |
|
22 |
29,852 |
0,041 |
|
23 |
29,828 |
0,048 |
|
24 |
29,904 |
0,065 |
|
25 |
29,902 |
0,013 |
Kết quả nhóm con được vẽ cùng với các giới hạn kiểm soát được tính ở trên (xem Hình A.5).
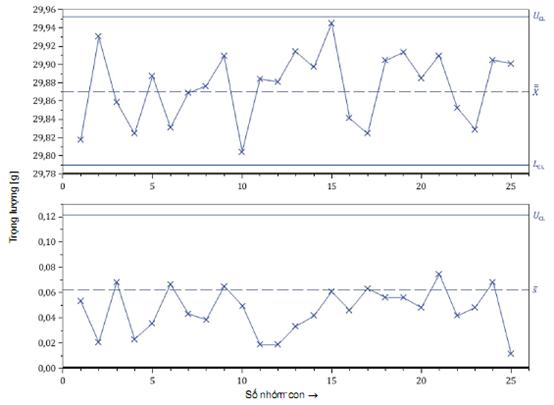
Hình A.5 - Biểu đồ ![]() và biểu đồ s - khối lượng pin
và biểu đồ s - khối lượng pin
Biểu đồ thể hiện trên Hình A.5 cho thấy quá trình trong trạng thái kiểm soát thống kê.
A.3.3 Biểu đồ kiểm soát cá thể và độ rộng trượt: m và s chưa biết
Bảng A.3 cho các kết quả phân tích phòng thí nghiệm “phần trăm độ ẩm” của mẫu từ 25 lô sữa bột phân lập liên tiếp. Mẫu sữa bột phân lập, đại diện cho lô, được phân tích trong phòng thí nghiệm với các đặc trưng như độ béo, độ ẩm, độ axit, chỉ số hòa tan, độ đóng cặn, vi khuẩn và đạm sữa. Mục đích là để kiểm soát phần trăm độ ẩm dưới 4 % đối với quá trình này. Độ biến động lấy mẫu trong lô riêng lẻ là không đáng kể, do vậy chỉ cần lấy một quan trắc trên mỗi lô và lập các giới hạn kiểm soát trên cơ sở độ rộng trượt của các lô liên tiếp.
Bảng A.3 - Phần trăm độ ẩm đối với 25 mẫu liên tiếp sữa bột phân lập
|
Số lô |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
|
X: độ ẩm % |
2,9 |
3,2 |
3,6 |
4,3 |
3,8 |
3,5 |
3,0 |
3,1 |
3,6 |
3,5 |
3,1 |
3,4 |
3,4 |
|
Rm |
|
0,3 |
0,4 |
0,7 |
0,5 |
0,3 |
0,5 |
0,1 |
0,5 |
0,1 |
0,4 |
0,3 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Số lô |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
25 |
|
|
X: độ ẩm % |
3,6 |
3,3 |
3,9 |
3,5 |
3,6 |
3,3 |
3,0 |
3,4 |
3,8 |
3,5 |
3,2 |
3,5 |
|
|
Rm |
0,2 |
0,3 |
0,6 |
0,4 |
0,1 |
0,3 |
0,3 |
0,4 |
0,4 |
0,3 |
0,3 |
0,3 |
|
Tính ![]() và
và
![]() :
:
Đường biểu đồ kiểm soát với độ rộng trượt, R:
Đường trung tâm CL = ![]() = 0,33 %
= 0,33 %
UCL = D4![]() = 3,267 x 0,33 = 1,078 ~ 1,08
= 3,267 x 0,33 = 1,078 ~ 1,08
LCL = D3![]() = 0 x 0,33
= 0 x 0,33
Giá trị của các hệ số D3 và D4 nhận được từ Bảng 2 với n = 2. Vì biểu đồ độ rộng thể hiện trạng thái kiểm soát thống kê nên có thể vẽ đồ thị biểu đồ kiểm soát cá thể.
Biểu đồ kiểm soát cá thể, X:
Đường trung tâm CL = ![]() = 3,44 %
= 3,44 %
UCL = ![]() = 3,44 + (2,66 x
0,33) = 4,317 8 ~ 4,32
= 3,44 + (2,66 x
0,33) = 4,317 8 ~ 4,32
LCL = ![]() + A3
x
+ A3
x ![]() = 3,44 - (2,66 x 0,33) = 2,562 2 ~
2,5
= 3,44 - (2,66 x 0,33) = 2,562 2 ~
2,5
Công thức cho giới hạn kiểm soát và giá trị của hệ số E2 được cho trong Bảng 2 và Bảng 3. Biểu đồ kiểm soát được vẽ trên Hình A.6. Biểu đồ kiểm soát cho biết quá trình nằm trong trạng thái kiểm soát thống kê.
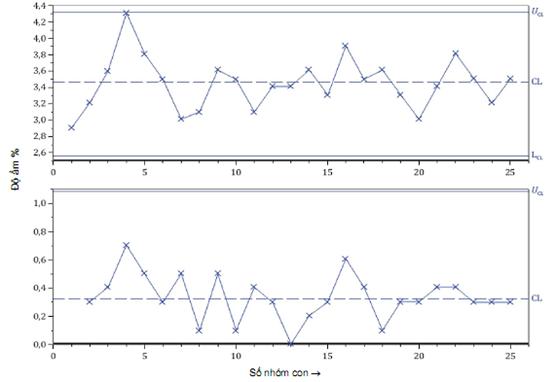
Hình A.6 - Biểu đồ kiểm soát cá thể X và độ rộng trượt Rm của sữa bột phân lập
A.3.4. Biểu đồ trung vị và biểu đồ R: m và s chưa biết
Máy sản xuất đĩa DVD với độ dày quy định từ 1,20 mm đến 1,25 mm. Cứ ba mươi phút lấy một mẫu cỡ 5 và độ dày của chúng theo milimét như được cho trong Bảng A.4. Quyết định lập biểu đồ trung vị để kiểm soát chất lượng. Giá trị của trung vị và độ rộng cũng được thể hiện trong Bảng A.4.
Bảng A.4 - Dữ liệu kiểm soát độ dày của các DVD
|
Giá trị theo đơn vị 0,001 mm |
|||||||
|
Số nhóm con |
Độ dày |
Trung vị
|
Độ rộng R |
||||
|
X1 |
X2 |
X3 |
X4 |
X5 |
|||
|
1 |
14 |
8 |
12 |
12 |
8 |
12 |
6 |
|
2 |
11 |
10 |
13 |
8 |
10 |
10 |
5 |
|
3 |
11 |
12 |
16 |
14 |
9 |
12 |
7 |
|
4 |
16 |
12 |
17 |
15 |
13 |
15 |
5 |
|
5 |
15 |
12 |
14 |
10 |
7 |
12 |
8 |
|
6 |
13 |
8 |
15 |
15 |
8 |
13 |
7 |
|
7 |
14 |
12 |
13 |
10 |
16 |
13 |
6 |
|
8 |
11 |
10 |
8 |
16 |
10 |
10 |
8 |
|
9 |
14 |
10 |
12 |
9 |
7 |
10 |
7 |
|
10 |
12 |
10 |
12 |
14 |
10 |
12 |
4 |
|
11 |
10 |
12 |
8 |
10 |
12 |
10 |
4 |
|
12 |
10 |
10 |
8 |
8 |
10 |
10 |
2 |
|
13 |
8 |
12 |
10 |
8 |
10 |
10 |
4 |
|
14 |
13 |
8 |
11 |
14 |
12 |
12 |
6 |
|
15 |
7 |
8 |
14 |
13 |
11 |
11 |
7 |
|
16 |
10 |
12 |
6 |
9 |
13 |
10 |
7 |
|
17 |
17 |
13 |
11 |
10 |
14 |
13 |
7 |
|
18 |
10 |
17 |
14 |
14 |
9 |
14 |
8 |
|
19 |
14 |
13 |
15 |
16 |
15 |
15 |
3 |
|
20 |
10 |
15 |
8 |
11 |
8 |
10 |
7 |
Tính trung bình của các trung vị độ rộng và nhóm con như sau:
![]()
![]()
Biểu đồ độ rộng được tính như sau:
Đường trung tâm CL = ![]() = 5,90
= 5,90
UCL = D4![]() = 2,114 x 5,90 = 12,472 6 ~ 12,5
= 2,114 x 5,90 = 12,472 6 ~ 12,5
LCL = D3![]() =
0 x 5,90 (vì n nhỏ hơn 7 nên LCL không được thể hiện)
=
0 x 5,90 (vì n nhỏ hơn 7 nên LCL không được thể hiện)
Giá trị của hằng số D3 và D4 được lấy từ Bảng 2 với n = 5. Vì biểu đồ độ rộng thể hiện trạng thái kiểm soát, nên có thể ước lượng đường biểu đồ trung vị.
Biểu đồ kiểm soát trung vị:
Đường trung tâm ![]()
UCL = ![]() + A4
+ A4![]() =
11,70 + (0,691 x 5,9) = 15,776 9 mm
~ 15,78 mm
=
11,70 + (0,691 x 5,9) = 15,776 9 mm
~ 15,78 mm
LCL = ![]() - A4
- A4![]() =
11,70 − (0,691 x 5,9) = 7,623 1 mm
~ 7,62 mm
=
11,70 − (0,691 x 5,9) = 7,623 1 mm
~ 7,62 mm
Giá trị của A4 được lấy từ Bảng 4 với n = 5. Đồ thị được vẽ trên Hình A.7. Thấy rõ ràng từ biểu đồ là quá trình thể hiện trạng thái kiểm soát thống kê.
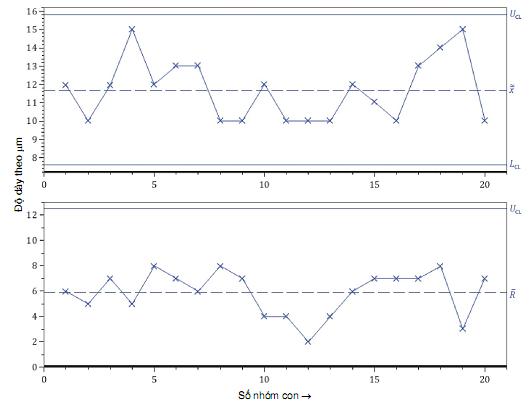
Hình A.7 - Biểu đồ trung vị và biểu đồ độ rộng với độ dày của DVD
A.4. Biểu đồ kiểm soát định tính
A.4.1. Biểu đồ p: giá trị p0 chưa biết
Công ty sản xuất linh kiện bán dẫn quyết định sử dụng biểu đồ p tỷ lệ không phù hợp. Dữ liệu được thu thập và phân tích trong khoảng thời gian một tháng. Từ mỗi ngày sản xuất, lấy mẫu ngẫu nhiên vào cuối ngày và kiểm tra số cá thể không phù hợp. Dữ liệu được thể hiện trong Bảng A.5.
Bảng A.5 - Linh kiện bán dẫn: Biểu đồ p (dữ liệu ban đầu)
|
Ngày |
Số kiểm tra |
Số không phù hợp |
Tỷ lệ không phù hợp |
|
1 |
158 |
11 |
0,070 |
|
2 |
140 |
11 |
0,079 |
|
3 |
140 |
8 |
0,057 |
|
4 |
155 |
6 |
0,039 |
|
5 |
160 |
4 |
0,025 |
|
6 |
144 |
7 |
0,049 |
|
7 |
139 |
10 |
0,072 |
|
8 |
151 |
11 |
0,073 |
|
9 |
163 |
9 |
0,055 |
|
10 |
148 |
5 |
0,034 |
|
11 |
150 |
2 |
0,013 |
|
12 |
153 |
7 |
0,046 |
|
13 |
149 |
7 |
0,047 |
|
14 |
145 |
8 |
0,055 |
|
15 |
160 |
6 |
0,038 |
|
16 |
165 |
15 |
0,091 |
|
17 |
136 |
18 |
0,132 |
|
18 |
153 |
10 |
0,065 |
|
19 |
150 |
9 |
0,060 |
|
20 |
148 |
5 |
0,034 |
|
21 |
135 |
0 |
0,000 |
|
22 |
165 |
12 |
0,073 |
|
23 |
143 |
10 |
0,070 |
|
24 |
138 |
8 |
0,058 |
|
25 |
144 |
14 |
0,097 |
|
26 |
161 |
20 |
0,124 |
|
Tổng số |
3 893 |
233 |
|
Giá trị tỷ lệ không phù hợp được tính cho mỗi nhóm con cũng được cho trong Bảng A.5. Tỷ lệ không phù hợp trung bình trong tháng được tính như sau:
![]()
trong đó
Nnc,tot là tổng số không phù hợp;
Ni,tot là tổng số được kiểm tra.
Vì cỡ nhóm con khác nhau nên các giá trị UCL và LCL được tính riêng cho mỗi nhóm con từ công thức
trong đó n là cỡ nhóm con.
Bảng A.6 thể hiện các kết quả tính cho mỗi nhóm con.
Bảng A.6 - Linh kiện bán dẫn - kết quả tính
|
Số nhóm con |
Số được kiểm tra |
Tỷ lệ không phù hợp p |
UCL |
LCL |
|
1 |
158 |
0,070 |
0,117 |
0,003 |
|
2 |
140 |
0,079 |
0,120 |
0,000 |
|
3 |
140 |
0,057 |
0,120 |
0,000 |
|
4 |
155 |
0,039 |
0,117 |
0,003 |
|
5 |
160 |
0,025 |
0,116 |
0,004 |
|
6 |
144 |
0,049 |
0,119 |
0,001 |
|
7 |
139 |
0,072 |
0,120 |
0,000 |
|
8 |
151 |
0,073 |
0,118 |
0,002 |
|
9 |
163 |
0,055 |
0,116 |
0,004 |
|
10 |
148 |
0,034 |
0,119 |
0,001 |
|
11 |
150 |
0,013 |
0,118 |
0,002 |
|
12 |
153 |
0,046 |
0,118 |
0,002 |
|
13 |
149 |
0,047 |
0,118 |
0,002 |
|
14 |
145 |
0,055 |
0,119 |
0,001 |
|
15 |
160 |
0,038 |
0,116 |
0,004 |
|
16 |
165 |
0,091 |
0,115 |
0,005 |
|
17 |
136 |
0,132 |
0,121 |
0,000 |
|
18 |
153 |
0,065 |
0,118 |
0,002 |
|
19 |
150 |
0,060 |
0,118 |
0,002 |
|
20 |
148 |
0,034 |
0,119 |
0,001 |
|
21 |
135 |
0,000 |
0,121 |
0,000 |
|
22 |
165 |
0,073 |
0,115 |
0,005 |
|
23 |
143 |
0,070 |
0,120 |
0,000 |
|
24 |
138 |
0,058 |
0,121 |
0,000 |
|
25 |
144 |
0,097 |
0,119 |
0,001 |
|
26 |
161 |
0,124 |
0,116 |
0,004 |
|
Tổng |
3893 |
|
|
|
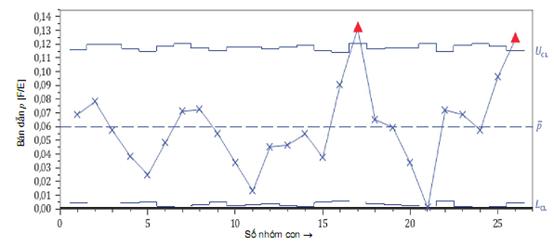
Hình A.8 - Biểu đồ p đối với linh kiện bán dẫn không phù hợp
Có thể thấy rằng việc vẽ đồ thị các giá trị UCL và LCL đối với mỗi nhóm con là công việc tốn nhiều thời gian. Có thể quan sát từ Hình A.8 là tỷ lệ không phù hợp đối với số nhóm con 17 và 26 nằm ngoài giới hạn kiểm soát trên tương ứng. Hai nhóm con này bị loại khỏi dữ liệu tính các giới hạn kiểm soát vì chúng thể hiện chịu sự biến động khác với biến động ảnh hưởng đến các nhóm con khác. Việc đưa chúng vào tính toán sẽ dẫn đến trung bình quá trình và giới hạn kiểm soát quá cao không phản ánh độ biến động ngẫu nhiên thực. Cần phải tìm nguyên nhân của các giá trị cao này để có hành động điều chỉnh nhằm ngăn ngừa tái diễn. Trung bình đã sửa đổi của tỷ lệ không phù hợp được tính từ 24 giá trị nhóm con còn lại.
![]()
![]() Việc tính các giá trị
UCL và LCL đã sửa đổi cho mỗi nhóm con bằng
cách sử dụng giá trị
Việc tính các giá trị
UCL và LCL đã sửa đổi cho mỗi nhóm con bằng
cách sử dụng giá trị ![]() đã sửa đổi cho thấy tất cả tỷ
lệ không phù hợp đều nằm trong các giới hạn kiểm soát tương ứng của chúng. Do
đó, giá trị
đã sửa đổi cho thấy tất cả tỷ
lệ không phù hợp đều nằm trong các giới hạn kiểm soát tương ứng của chúng. Do
đó, giá trị ![]() đã sửa đổi này được lấy là tỷ lệ không
phù hợp chuẩn cho mục đích lập biểu đồ kiểm soát. Như vậy, p0
= 0,054.
đã sửa đổi này được lấy là tỷ lệ không
phù hợp chuẩn cho mục đích lập biểu đồ kiểm soát. Như vậy, p0
= 0,054.
Như đã lưu ý ở trên, việc vẽ đồ thị các giới hạn kiểm soát trên đối với mỗi nhóm con cỡ khác nhau là quá trình không hấp dẫn và tốn thời gian. Tuy nhiên vì cỡ nhóm con không khác nhiều với cỡ nhóm con trung bình là 150, nên có thể vẽ biểu đồ p đã sửa đổi (sử dụng p0 = 0,054) với giới hạn kiểm soát trên bằng cách sử dụng cỡ nhóm con n = 150, như cỡ nhóm con trung bình.
Như vậy, các đường của biểu đồ p đã sửa đổi được tính như sau:
Đường trung tâm CL = p0 = 0,054
![]()
![]()
CHÚ THÍCH: Vì không thể có giá trị âm nên giới hạn dưới không được thể hiện.
Biểu đồ p đã sửa đổi được vẽ trên Hình A.9. Quá trình biểu thị trạng thái kiểm soát thống kê.
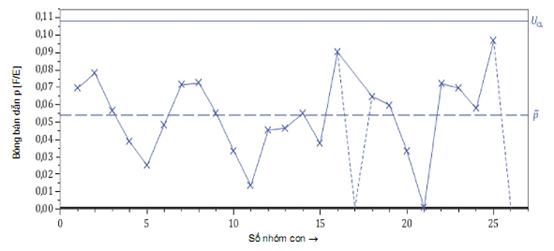
Hình A.9 - Biểu đồ p đã sửa đổi cho linh kiện bán dẫn không phù hợp
A.4.2. Biểu đồ np: không cho giá trị p0
Dữ liệu trong Bảng A.7 cho số đơn vị không phù hợp mỗi giờ liên quan đến các lỗi được phát hiện do kiểm tra 100 % công tắc nhỏ bằng thiết bị kiểm tra tự động. Công tắc được sản xuất trong dây chuyền lắp ráp tự động. Vì các lỗi nghiêm trọng nên phần trăm không phù hợp được sử dụng để nhận biết khi nào thì dây chuyền lắp ráp không được kiểm soát. Biểu đồ np được chuẩn bị bằng cách thu thập dữ liệu của 25 nhóm làm dữ liệu ban đầu vì số kiểm tra là không đổi.
Bảng A.7 - Dữ liệu ban đầu: công tắc
|
Số nhóm con |
Số công tắc đã kiểm tra |
Số công tắc không phù hợp |
Phần trăm không phù hợp |
|
1 |
4000 |
8 |
0,200 |
|
2 |
4000 |
14 |
0,350 |
|
3 |
4000 |
10 |
0,250 |
|
4 |
4000 |
4 |
0,100 |
|
5 |
4000 |
13 |
0,325 |
|
6 |
4000 |
9 |
0,225 |
|
7 |
4000 |
7 |
0,175 |
|
8 |
4000 |
11 |
0,275 |
|
9 |
4000 |
15 |
0,375 |
|
10 |
4000 |
13 |
0,325 |
|
11 |
4000 |
5 |
0,125 |
|
12 |
4000 |
14 |
0,350 |
|
13 |
4000 |
12 |
0,300 |
|
14 |
4000 |
8 |
0,200 |
|
15 |
4000 |
15 |
0,375 |
|
16 |
4000 |
11 |
0,275 |
|
17 |
4000 |
9 |
0,225 |
|
18 |
4000 |
18 |
0,450 |
|
19 |
4000 |
6 |
0,150 |
|
20 |
4000 |
12 |
0,300 |
|
21 |
4000 |
6 |
0,150 |
|
22 |
4000 |
12 |
0,300 |
|
23 |
4000 |
8 |
0,200 |
|
24 |
4000 |
15 |
0,375 |
|
25 |
4000 |
14 |
0,350 |
|
Tổng số |
100000 |
269 |
|
Đường trung tâm và các giới hạn kiểm soát được tính và vẽ như dưới đây.
Tính biểu đồ np:
Đường trung tâm ![]()
![]()
![]()
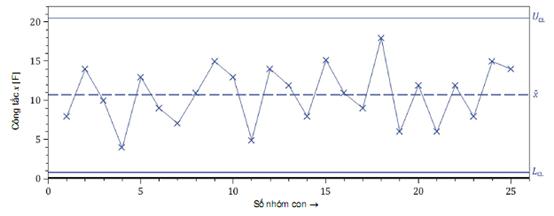
Hình A.10 - Biểu đồ np đối với công tắc
Hình A.10 cho thấy chất lượng của công tắc nằm trong kiểm soát thống kê. Những giới hạn kiểm soát này có thể được sử dụng cho các nhóm con sau này cho đến khi quá trình thay đổi hoặc quá trình nằm ngoài kiểm soát thống kê. Cần lưu ý rằng khi quá trình nằm trong kiểm soát thống kê, không thể đưa ra bất kỳ cải tiến nào mà không thay đổi quá trình. Cỡ mẫu kiểm soát trong tương lai là 500 thay cho 4 000 có thể phù hợp.
Nếu thực hiện cải tiến thì các giới hạn kiểm soát khác nhau sẽ được tính cho các nhóm con trong tương lai để phản ánh hiệu năng quá trình thay đổi. Nếu quá trình đã được cải tiến (giá trị np nhỏ hơn) thì sử dụng các giới hạn mới, nhưng nếu quá trình suy giảm chất lượng (giá trị np cao hơn) thì tìm các nguyên nhân ấn định được bổ sung.
A.4.3. Biểu đồ c: không cho giá trị c0
Người sản xuất băng video muốn kiểm soát số không phù hợp do vết trong băng video. Dữ liệu sau đây cho số vết không phù hợp được tìm thấy nhờ việc kiểm tra liên tiếp bề mặt của 20 băng video, mỗi băng dài 350 m, từ quá trình sản xuất nhất định trong đó một đầu của băng video được kiểm tra.
Để kiểm soát quá trình này, sử dụng biểu đồ c vẽ đồ thị số vết không phù hợp. Dữ liệu của 20 băng cho trong Bảng A.8 được lấy làm dữ liệu ban đầu để xây dựng biểu đồ c.
Bảng A.8 - Dữ liệu ban đầu - băng video
|
Số vòng |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
Tổng số |
|
Số vết không phù hợp |
7 |
1 |
2 |
5 |
0 |
6 |
2 |
0 |
4 |
4 |
6 |
3 |
3 |
3 |
1 |
6 |
3 |
1 |
5 |
6 |
68 |
Đường trung tâm và các giới hạn kiểm soát được tính và vẽ dưới đây.
Đường trung tâm ![]()
![]()
Khi giới hạn kiểm soát dưới (LCL) âm thì không có giới hạn kiểm soát dưới.
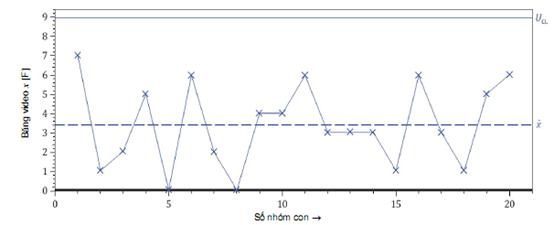
Hình A.11 - Biểu đồ c cho dữ liệu từ sản xuất băng video
Dữ liệu ban đầu cho biết quá trình nằm trong trạng thái kiểm soát thống kê.
A.4.4. Biểu đồ u - không cho trước giá trị u0
Trong một nhà máy sản xuất lốp xe, 50 lốp xe được kiểm tra nửa giờ một lần, tổng số không phù hợp và số không phù hợp trên mỗi đơn vị được ghi lại. Quyết định lập biểu đồ u cho số không phù hợp trên mỗi đơn vị để nghiên cứu trạng thái kiểm soát quá trình. Dữ liệu được cho trong Bảng A.9.
Trung bình của giá trị u được tính từ bảng như sau:
Bảng A.9 - Số không phù hợp trên mỗi đơn vị (các đơn vị được kiểm tra trên mỗi nhóm con, n = 50)
|
Số nhóm con |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
c: Số không phù hợp |
4 |
5 |
3 |
6 |
2 |
1 |
5 |
6 |
2 |
4 |
|
|
u: Số không phù hợp trên mỗi đơn vị |
0,08 |
0,10 |
0,06 |
0,12 |
0,04 |
0,02 |
0,10 |
0,12 |
0,04 |
0,08 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Số nhóm con |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
Tổng |
|
c: Số không phù hợp |
7 |
5 |
2 |
3 |
5 |
1 |
2 |
6 |
3 |
5 |
77 |
Chia toàn bộ số không phù hợp (từ hàng giá trị c) cho toàn bộ số đơn vị được kiểm tra.
CHÚ THÍCH: Vì không thể có giá trị âm nên giới hạn dưới không được thể hiện.
Dữ liệu và đường kiểm soát được vẽ trong Hình A.12 dưới đây.
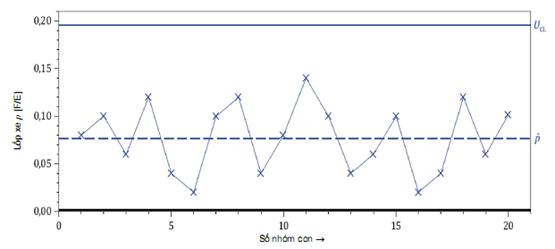
Hình A.12 - Biểu đồ u cho dữ liệu từ sản xuất lốp xe
Hình A.12 cho thấy quá trình nằm trong trạng thái kiểm soát thống kê.
CHÚ THÍCH: Vì cỡ nhóm con là không đổi nên có thể sử dụng biểu đồ c.
PHỤ LỤC B
(tham khảo)
Chú dẫn thực hành về phép kiểm nghiệm dạng đối với nguyên nhân biến động ấn định được
Chú dẫn thực hành về việc sử dụng phép kiểm nghiệm dạng trong Hình 3 được cho như dưới đây:
a) Có sẵn nhiều phép kiểm nghiệm dạng khác nhau. Các phép kiểm nghiệm dạng được thể hiện trong Hình 3 là các phép kiểm nghiệm thường được sử dụng. Mục đích của biểu đồ kiểm soát Shewhart là xác nhận xem quá trình ở trạng thái ổn định hay không ổn định. Ví dụ, quá trình oxy hóa trong quá trình sản xuất chất bán dẫn có xu hướng chịu ảnh hưởng của áp suất khí quyển, các loạt có thể xuất hiện trên biểu đồ kiểm soát. Tuy nhiên, trạng thái như vậy không được coi là bất thường mà là trạng thái thông thường. Do đó, pin có dạng phép kiểm nghiệm dạng trong Hình 3 không được coi là nguyên tắc cụ thể mà được sử dụng như một hướng dẫn. Phép kiểm nghiệm dạng cần được quy định theo trạng thái thông thường của quá trình.
b) Như được nêu trong Điều 8, nếu một số phép kiểm nghiệm trên Hình 3 được sử dụng cùng nhau, thì xác suất sai lầm loại một có thể quá lớn. Tuy nhiên, trong giai đoạn sản xuất ban đầu, mục đích của kiểm soát thống kê quá trình là đưa quá trình vào trạng thái ổn định và cải tiến quá trình cho hiệu năng quá trình tốt hơn. Do đó, ta phải phát hiện các nguyên nhân ấn định được một cách tích cực và nhanh chóng bằng cách sử dụng một số phép kiểm nghiệm trên Hình 3; tuy nhiên, xác suất sai lầm loại một có thể quá lớn. Đây có thể được coi là phân tích dữ liệu thăm dò. Mặt khác, khi giai đoạn sản xuất chuyển sang sản xuất hàng loạt thông thường, mục đích của kiểm soát thống kê quá trình là duy trì quá trình ở trạng thái kiểm soát. Trong trường hợp này đòi hỏi xác suất sai lầm loại một là rất nhỏ. Do đó, cần tránh sử dụng cùng lúc một số phép kiểm nghiệm. Phép kiểm nghiệm 1 là nguyên tắc cơ bản của biểu đồ kiểm soát Shewhart, nhưng đây là phép kiểm nghiệm vô hướng. Nếu độ trôi tương đối nhỏ và/hoặc xu hướng trong trung bình quá trình xuất hiện thì việc sử dụng nguyên tắc bổ sung là rất hữu ích. Ví dụ, có thể quy định phép kiểm nghiệm 5 về Quy tắc của công ty Western Electric như nguyên tắc bổ sung cho Phép kiểm nghiệm 1.
c) Quy tắc của công ty Western Electric: Có nhiều tiêu chí khác nhau cho việc nhận biết nguyên nhân ấn định được. Một trong những nguyên tắc thường được sử dụng từ những năm 1950 là chuẩn mực kiểm nghiệm gọi là Quy tắc của công ty W estern Electric hoặc nguyên tắc AT&T. Hình B.1 thể hiện tám chuẩn mực kiểm nghiệm điển hình được cho trong những nguyên tắc này. Như đã nêu trước đó, quyết định sử dụng tiêu chí nào phụ thuộc vào quá trình được nghiên cứu.
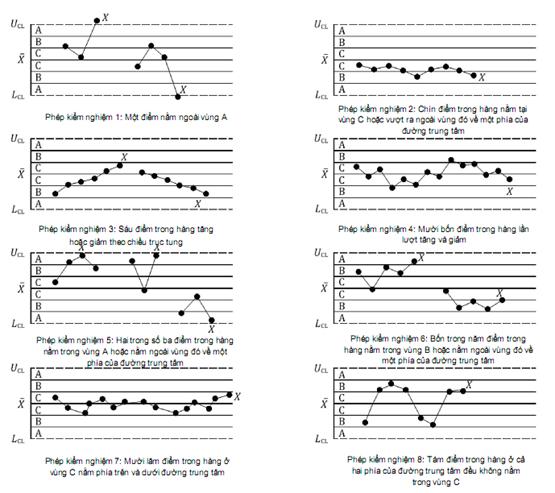
Hình B.1 - Phép kiểm nghiệm dạng với nguyên nhân ấn định được
THƯ MỤC TÀI LIỆU THAM KHẢO
[1] Shewhart W.A. Economic Control of Manufactured Product. D. Van Norstrand, Co, New York, 1931, pp.501 (Kiểm soát kinh tế sản phẩm được sản xuất)
[2] NELSON L.S. The Shewhart Control Chart - Test for Special Cause. Journal of Quality Technology. 1984 October, 16 (4) pp. 237-239 (Biểu đồ kiểm soát Shewhart - Phép kiểm nghiệm đối với nguyên nhân đặc biệt. Tạp chí công nghệ chất lượng)
[3] NELSON L.S. Interpreting Shewhart ![]() Control Charts. Journal of Quality
Technology. 1985 April, 17 (2) pp.114-116 (Giải thích biểu đồ kiểm soát Shewhart
Control Charts. Journal of Quality
Technology. 1985 April, 17 (2) pp.114-116 (Giải thích biểu đồ kiểm soát Shewhart
![]() . Tạp chí công nghệ chất lượng)
. Tạp chí công nghệ chất lượng)
[4] KLEIN M.Two Alternatives to the Shewhart ![]() Control Chart. Journal of Quality
Technology. 2000, 32 pp.427-431 (Hai giải pháp thay thế đối với biểu đồ kiểm
soát Shewhart
Control Chart. Journal of Quality
Technology. 2000, 32 pp.427-431 (Hai giải pháp thay thế đối với biểu đồ kiểm
soát Shewhart ![]() . Tạp chí công nghệ chất
lượng)
. Tạp chí công nghệ chất
lượng)
[5] GRANT E., & LEAVENWORTH R. Statistical Quality Control. McGram-Hill Series in Industrial Engineering and Management, 1996 (Kiểm soát chất lượng thống kê)
[6] PRABHU S.S., MONTGOMERY D.C., RUNGER G.C.
A Combined Adaptive Sample Size and Sampling Interval ![]() Control
Scheme. Journal of Quality Technology. 1994, 26 pp.164-176 (Cỡ mẫu thích
ứng được kết hợp và lấy mẫu sơ đồ kiểm soát khoảng
Control
Scheme. Journal of Quality Technology. 1994, 26 pp.164-176 (Cỡ mẫu thích
ứng được kết hợp và lấy mẫu sơ đồ kiểm soát khoảng ![]() . Tạp
chí công nghệ chất lượng)
. Tạp
chí công nghệ chất lượng)
[7] TAGARAS G.A Survey of Recent Developments in the Design of Adaptive Control Charts. Journal of Quality Technology. 1998, 30 pp.212-231 (Khảo sát về sự phát triển gần đây trong thiết kế biểu đồ kiểm soát thích ứng. Tạp chí công nghệ chất lượng)
[8] NISHINA K., KUZUYA K., ISHI N. Reconsideration of Control Charts in Japan. Frontiers in Statistical Quality Control. 2005, 8 pp. 136-150 (Xem xét lại các biểu đồ kiểm soát ở Nhật Bản. Biên giới trong kiểm soát thống kê chất lượng).
MỤC LỤC
Lời nói đầu
Lời giới thiệu
1. Phạm vi áp dụng
2. Tài liệu viện dẫn
3. Thuật ngữ, định nghĩa và ký hiệu
4. Tính chất của biểu đồ Shewhart
5. Các loại biểu đồ kiểm soát
5.1. Biểu đồ kiểm soát khi không có giá trị quy định trước
5.2. Biểu đồ kiểm soát đối với các giá trị quy định trước đã cho
5.3. Các loại biểu đồ kiểm soát định lượng và định tính
6. Biểu đồ kiểm soát định lượng
6.1. Biểu đồ trung bình (![]() ) và biểu đồ độ rộng (R) hoặc biểu
đồ trung bình (
) và biểu đồ độ rộng (R) hoặc biểu
đồ trung bình (![]() ) và biểu đồ độ lệch chuẩn (s)
) và biểu đồ độ lệch chuẩn (s)
6.2. Biểu đồ kiểm soát cá thể (X) và biểu đồ kiểm soát với độ rộng trượt (Rm)
6.3. Biểu đồ kiểm soát trung vị ![]()
7. Quy trình kiểm soát và giải thích biểu đồ kiểm soát định lượng
7.1. Thu thập dữ liệu ban đầu
7.2. Kiểm tra biểu đồ s (hoặc R)
7.3. Loại bỏ nguyên nhân ấn định được và sửa lại biểu đồ
7.4. Kiểm tra biểu đồ X
7.5. Theo dõi liên tục quá trình
8. Các phép kiểm nghiệm dạng đối với nguyên nhân biến động ấn định được
9. Kiểm soát quá trình, năng lực quá trình và cải tiến quá trình
10. Biểu đồ kiểm soát định tính
11. Xem xét sơ bộ trước khi bắt đầu biểu đồ kiểm soát
11.1. Lựa chọn quan trọng đối với đặc trưng chất lượng (CTQ) mô tả quá trình kiểm soát
11.2. Phân tích quá trình
11.3. Lựa chọn nhóm con hợp lý
11.4. Tần số và cỡ nhóm con
11.5. Thu thập dữ liệu ban đầu
11.6. Kế hoạch hành động đối với tình trạng mất kiểm soát
12. Các bước xây dựng biểu đồ kiểm soát
12.1. Xác định chiến lược thu thập dữ liệu
12.2. Thu thập và tính dữ liệu
12.3. Vẽ biểu đồ ![]() và
biểu đồ R
và
biểu đồ R
13. Cảnh báo đối với biểu đồ kiểm soát Shewhart
13.1. Cảnh báo chung
13.2. Dữ liệu tương quan
13.3. Sử dụng nguyên tắc thay thế nguyên tắc 3 sigma
Phụ lục A (tham khảo) Ví dụ minh họa
Phụ lục B (tham khảo) Chú dẫn thực hành về phép kiểm nghiệm dạng đối với nguyên nhân biến động ấn định được
Thư mục tài liệu tham khảo